
Release notes for the Genode OS Framework 13.05
With Genode 13.05, we have diverged quite a bit from the feature-laden plans laid out in our https://genode.org/about/road-map as we realized that consolidating and optimizing the current feature set will have a more sustainable effect than functional enhancements at this point. In particular, we addressed the problem that the ever growing diversity of platforms imposes on the quality and coverage of testing. We also desired to extend our systematic testing efforts to real hardware platforms, and to have a mechanism for detecting performance regressions. Section Automated quality-assurance testing details how we approached these challenges, and how we went on analyzing Genode's network performance in particular.
That said, we haven't completely restrained ourself from implementing new features. Closely related to test automation but very useful in other situations, we improved the terminal infrastructure in order to enable the interactive use of dynamic system scenarios in headless situations. Section Terminal infrastructure introduces a new command-line interface for managing Genode subsystems.
With regard to platform support, the current release follows up on the hardware support added in the previous releases. For Samsung Exynos-5-based platforms, drivers for USB-3, fast-ethernet networking, gigabit networking, eMMC, and SATA have been added. For Freescale i.MX53-based devices, new drivers for display, touchscreen, and GPIO have become available. The OMAP4 display driver has been enhanced to cover both LCD displays and HDMI. Our custom base-hw kernel has been enabled on the Raspberry Pi board. Finally, Linux/ARM was added to accompany Linux/x86 as a fully usable Genode base platform.
Automated quality-assurance testing
One of the greatest challenges of the Genode OS Framework is preventing regressions in the face of the growing number of supported platforms. The challenge stems from the fact that the space of Genode scenarios grow two-dimensional. On one axis, the software stack on top of Genode gets more and more complex, which calls for contiguous testing. On the other axis, there is a growing number of kernel and hardware platforms to support. In principle, there are even more dimensions, for example the diversity of tool chains or the diversity of the OS used on the development machine. Luckily, the problem of tool-chain diversity could be mitigated with the introduction of the Genode tool chain since version 11.11, which was a huge relief. However, the mentioned two dimensions cannot be avoided. Because manual testing of manifold scenarios of component compositions on top of many different kernels became infeasible, we automated the task of building and testing years ago.
The automated builder checks out the staging branch of Genode, prepares the repositories that integrate 3rd-party code, and builds the software for 12 different kernel/platform combinations. Not all 3rd-party software packages are built for each combination though. But we make sure that each piece of software is exposed to different combinations of CPU architectures and kernels.
The build test is accompanied with automated runtime tests of various run scripts on Qemu. Each run script listed in tool/autopilot.lst is executed on each kernel using the autopilot tool. The tests range from stimulating low-level mechanisms (such as signal, timer, and ldso) to complex scenarios (such as testing networking with L4Linux, or running Noux).
Both build and runtime tests are executed daily. If any of the tests fail, the Genode developers receive a notification email. Once all tests are passed, the staging branch can be merged into the master branch. This way, we spare the users of Genode to deal with intermediate problems introduced in the staging branch.
The build and runtime tests have become a fundamental tool for our development work. With the growing variety of real hardware (as opposed to hardware emulated via Qemu), however, our existing solution was falling short. Even though our tests confirm that Genode is running happily on Qemu, they won't help us to detect regressions in our device drivers for non-Qemu hardware such as Pandaboard, Arndale, or modern PC hardware. Furthermore, we are increasingly focussing on performance considerations. In order to be a viable OS platform, Genode does not only need to be able to do networking, but networking performance must be on par with mainstream OSes. This raises the new challenge to extend our continuous-testing tools to become continuous-benchmarking tools. The ultimate goal is to monitor the performance of Genode on real hardware over long periods of development.
In this release cycle, we attacked this problem in two steps. First, we enabled Genode's run tool to target not only Qemu but real hardware, with the premise that existing run scripts must not be changed. The second step is the creation of new run scripts that perform benchmarks in an automated fashion. By aggregating the results of this automatically executed benchmarks, we can correlate performance effects with commits in our code repository.
Targeting real hardware via the run tool
In the following, we briefly describe the procedure to execute run scripts on native hardware, for both Intel-based x86 machines and ARM-based platforms.
TFTP boot x86
The following description uses NOVA as an example to illustrate the usage. Other base platforms are supported as well and can be configured analogously.
Pulsar is a tiny boot loader that uses PXE to fetch boot images via TFTP over the network. On the x86 architecture, Genode supports the automatic generation of Pulsar configuration files, which can be placed directly onto a TFTP server. Genode can be booted via Pulsar using the following steps:
-
On the x86 test machine, enable "PXE boot feature" in the BIOS.
-
When booting, the machine will look for a DHCP server announcing a TFTP server. So you need to make sure to have both the DHCP server and the TFTP server configured such that the pulsar binary will be loaded as PXE binary.
-
After the PXE BIOS of the test machine has loaded and started the pulsar binary, Pulsar will look on the TFTP server for a file called config-XX-XX-XX-XX-XX-XX, where the sequence of XX corresponds to the MAC address of the test machine. For example, if the MAC of the network card is 01:02:03:04:05:06, Pulsar would request a file called config-01-02-03-04-05-06.
-
Using this configuration file, we direct Pulsar to the configuration generated by the run tool. I.e., it should look as follows
root /tftpboot/nova config config-00-00-00-00-00-00
The lines above tell pulsar to load another config file, which contains the actual configuration. To instruct the run script to actually generate the config-00-00-00-00-00-00 file, set the following environment variables in your shell prior executing the run script:
export PXE_TFTP_DIR_BASE=/tftpboot export PXE_TFTP_DIR_OFFSET=/nova
The two-staged configuration of Pulsar may look overly complicated at first sight but has the benefit that the run tool does not need to know the MAC address of the test machine in order to generate the Pulsar configuration file.
-
Create a symbolic link /tftpboot/nova pointing to the corresponding Genode build directory.
-
The next time make run/printf is invoked, the run script will generate the config-00-00-00-00-00-00 in /tftpboot/nova.
-
When rebooting the test machine, it will load and start the printf test.
TFTP boot using U-Boot
Configure your U-Boot boot loader to load the images via TFTP.
The remainder of the procedure is similar to the description for x86 above. On ARM platforms, the run tool automatically generates the uBoot image and creates a symbolic link into the TFTP directory.
-
Pandaboard:
export PXE_TFTP_DIR_BASE=/tftpboot export PXE_TFTP_DIR_OFFSET=/panda ln -s <genode-build-dir> /tftpboot/panda RUN_OPT="--target uboot" make run/printf
-
Arndale board:
export PXE_TFTP_DIR_BASE=/tftpboot export PXE_TFTP_DIR_OFFSET=/arndale ln -s <genode-build-dir> /tftpboot/panda RUN_OPT="--target uboot" make run/printf
Output and reset with Intel's AMT
Most modern x86-based machines lack a COM port, which is normally used for kernel debug messages as well as LOG messages printed by Genode's core. However, Intel's Advanced Management Technology (AMT) can be used to obtain the serial output of the test machine and to reset the test machine. To use AMT with Genode's run tool, install the amtterm package (version 1.3 is known to work well) and set the following environment variables, specifying the IP address of the test machine and the AMT password.
export AMT_TEST_MACHINE_IP=XXX.XXX.XXX.XXX export AMT_TEST_MACHINE_PWD=XXXXXXXXX
Via setting the RUN_OPT environment variable, we instruct the run tool to use AMT instead of Qemu. The following command will reset the test machine, the test machine will load the binaries of the printf run script via PXE, and we will be able to see the serial output of the test machine through Intel's AMT Serial Over Line (SOL),
RUN_OPT="--target amt" make run/printf
Output via a COM port (UART)
If the x86 test machine, Pandaboard or Arndale test board is connected via UART, the run tool can use a specified command to interact with it.
For example, if the UART interface of the test machine is connected directly to the host machine at /dev/ttyUSB3, and the picocom tool is available, the following command can be used to establish a connection:
RUN_OPT="--target serial --serial-cmd \"picocom -b 115200 /dev/ttyUSB3\"" make run/printf
Alternatively, if the board is connected to some remote machine, which exports the corresponding serial line via TCP/IP, the socat tool can be used for communicating with the remote test machine:
RUN_OPT="--target serial --serial-cmd \"socat - tcp:10.0.0.1:2000\"" make run/printf
Reset via a IP power plug NETIO-230B from Koukaam
At Genode Labs, we use a NETIO-230B power plug to automate power-cycling ARM boards. This power plug can be controlled over the network. For example, if the Pandaboard is connected to power port 3, the following command will automatically turn on the board when the run script is started:
RUN_OPT="--target uboot --target reset --reset-port 2 --reset-ip 10.0.0.1 --reset-user admin --reset-passwd secret" make run/printf
The --target reset option can be combined with --target uboot to instruct the run tool to boot via TFTP (as described above) and take care of power cycling. When the run script has finished, the specified port will be automatically switched off by the run tool.
Of course, the IP address settings, as well as the actual user name and password, to access the NETIO-230B power plug, have to be adjusted accordingly.
Automated benchmarking
With the --target features added to the run tool, the road is paved to obtain benchmark results in an automated fashion. Currently, we are most interested in exploring the network-performance characteristics of Genode.
Network performance can be explored at different levels. We started with looking at raw driver performance, then looked at the overhead of separating the network application from the device driver (and thereby introducing inter-process communication overhead), and finally explored the effects of the TCP/IP stack.
For pursuing the packet-level performance measurements, we crafted a library called net-stat, which contains the application logic of a low-level benchmark operating at network-packet level. This library has been successively incorporated into the dde_ipxe NIC driver and the usb_drv (NIC driver via ethernet-over-USB) to measure the raw driver performance without any microkernel overhead or TCP/IP protocol overhead.
To see the influence of the inter-process communication, namely the packet-stream interface employed by Genode's NIC-session interface, we implanted the same net-stat library into a NIC-session client. This experiment enables us to compare the operation of the NIC driver with the operation of a NIC driver separated from the NIC application.
The raw networking tests can be executed automatically using the set of network_test_nic*.run scripts located at os/run. The scenario sends raw ethernet packets from the host machine to the target machine. Three tests are provided: The network_test_nic_raw.run test measures the net-stat-instrumented driver (of usb_drv and net_drv respectively) to observe the raw receive performance. The network_test_nic_raw_client.run test implements the benchmark in a NIC-session client connected to the NIC driver running as a separate component whereas the NIC driver is not instrumented. The network_test_nic_raw_bridge_client.run test further adds a NIC bridge in-between the driver and the NIC-session client.
In addition to analyzing the performance on a low level, we investigated the effects of TCP/IP for the application performance. This topic is covered in more detail in Section TCP/IP performance.
Terminal infrastructure
Closely related to the quality-assurance measures detailed in the previous section, there is the arising need to interact with increasingly complex system scenarios in headless settings. In particular when executing tests remotely on a development board, manual user-interaction via a GUI becomes impractical. We vastly prefer a low-bandwidth textual interface in such situations. But how should a textual user interface for dynamic systems comprised of many components look like? This is particularly difficult because most development boards are equipped with merely a single UART connector.
On a normal Genode system, the UART connector is typically used by the kernel debugger to print debugging output, or for the interactive use of a debugger. This leaves no interface for interacting with Genode components. So how can we expose complex scenarios, such as concurrently running several instances of Genode subsystems, to the user? Our solution consists of three parts: A pseudo UART driver for Genode that uses the kernel debugger as back end, a terminal-multiplexing facility running on the reference platform, and a command-line based tool for interacting with Genode. By combining those, the user can interact with the kernel debugger, a Genode command line, and the consoles of executed Linux instances over a single serial connection.
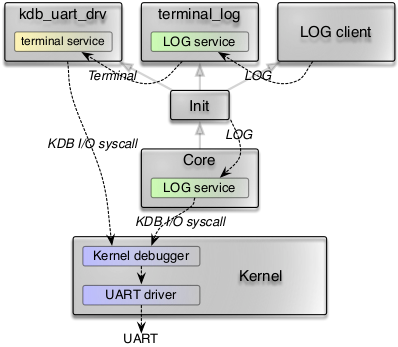
The pseudo UART driver called kdb_uart_drv is a Genode service that implements the Uart::Session interface. Therefore, it can be combined with all components that use the Uart::Session or the Terminal::Session interfaces, for example the Noux runtime environment, the terminal_log service (for displaying LOG messages via the terminal interface), L4Linux, or programs linked against the libc_terminal plugin. The kdb_uart_drv component is located at os/src/drivers/uart/kdb. It does not access a real UART device but rather uses the user-level bindings of the kernel debugger to indirectly read and write data over the UART interface.
|
|
The kdb_uart_drv driver used for sharing one UART among the kernel debugger, core's LOG service, and a terminal client application running on Genode.
|
Figure 1 illustrates the relationship between the kernel debugger, core's LOG service, and kdb_uart_drv. Because write operations target the kernel debugger directly, core's LOG service gets bypassed. Output written to the kdb_uart_drv will directly appear at the terminal program of the host system. Because kdb_uart_drv has direct access to the host terminal, it can leverage all facilities of the host terminal, in particular various escape sequences for terminal manipulations. For reading from the kernel debugger, there is no way to block for UART input. Hence, the kdb_uart_drv periodically polls for new input with a period of 20 milliseconds. If new input is available, the driver reads as many characters as available at once. So the runtime overhead of polling is negligible. To test kdb_uart_drv as individual component, there is a run script provided at os/run/kdb_uart_drv.run.
Thanks to kdb_uart_drv, both the kernel debugger and Genode can share one single UART connection. So we have a principal way to let the user interact with a Genode component that uses the Terminal::Session interface. However, typical system scenarios should accommodate not just a single program but multiple Linux instances and native Genode applications simultaneously, each requiring a dedicated Terminal::Session. Hence, we need a way to multiplex the Terminal::Session interface between those clients. Our multiplexing solution comes in the form of a component called terminal_mux, which we just introduced in the previous release. It uses a single terminal connection to implement a text-based user interface to multiple virtual terminal consoles.
|
|
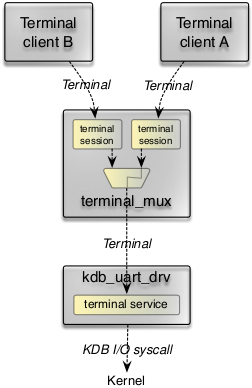
Operation of the terminal_mux service.
|
Figure 2 depicts the basic functioning of this component. For terminal_mux clients, the service implements the Linux terminal capabilities. For doing that, it shares large parts of the implementation of the existing Genode terminal program. For each client, terminal_mux renders the client output into a client-specific text-screen buffer. So any number of clients can perform output on terminal_mux concurrently. According to the selection by the user, terminal_mux periodically translates one client buffer (the foreground buffer) to escape sequences as understood by the host terminal. This translation is performed using the ncurses library. The user can pick the foreground buffer using an interactive menu that can be activated via the keyboard shortcut Control-x.
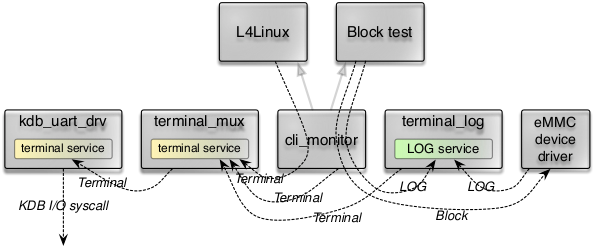
By combining kdb_uart_drv with terminal_mux, we created a flexible way to let the user interact with many Genode applications. The last part missing for a real dynamic system is a text-based command interface to start and stop Genode subsystems. This functionality is provided by the new cli_monitor component located at os/src/app/cli_monitor. It uses the Terminal::Session interface to present a simple interactive command line with commands for starting and stopping Genode subsystems, entering the kernel debugger, and showing status information. It provides tab completion and inline help to make it easily explorable. The cli_monitor component is integrated in the scenario of the terminal_mux.run script mentioned above. Because cli_command is a Terminal::Session client, it can be interfaced with terminal_mux. This composition is illustrated by Figure 3.
|
|
Overview of the terminal infrastructure as employed in the demonstration scenario.
|
Note that in some situations, e.g., when killing subsystems, the kernel, core, or the init process may print LOG messages. Because those messages are naturally not routed through terminal_log, they will interfere with the operation of terminal_mux and thereby result in visible inconsistencies. Pressing Control-x will clear such artifacts. This will bring up the terminal_mux menu, which implicitly triggers the redraw of the entire terminal.
Base framework
The current release comes with incremental improvements of the MMIO framework API and a new utility to ease the synchronized accesses to otherwise unsynchronized class interfaces.
- MMIO framework improvements
For native Genode device drivers, we consistently use our MMIO framework API. These utilities help us to safeguard the access to individual bit fields of memory-mapped device registers and cleanly separate the declaration of device registers from the driver logic. During the increased use of the API, we observe that the Genode::Mmio class template operates mostly on addresses that belong to dataspaces provided by core's IO_MEM service. Those dataspaces are typically obtained via the Attached_io_mem_dataspace convenience class, which requests the dataspace and attaches it to the local address space at once. To further reduce repetitive code, we introduced the new Attached_mmio class (located at os/attached_mmio.h), which handles the common case of making the content of a IO_MEM dataspace available through register definitions using the Mmio utility. Furthermore, the MMIO framework API has been enhanced with a variant of the Mmio::wait_for() function that waits for whole register values rather than bits.
- Synchronized interfaces
Most Genode programs are multi-threaded, which makes the proper use of locks inevitable. For most data structures, Genode does not implicitly manage the locking but expects the user of the data structures to know what he is doing. This way, we can avoid the locking overhead if a data structure is known to be accessed by a single thread only. If accessed by multiple threads, we usually wrap such data structures within an accessor interface that takes care of the locking. For example, for the Allocator interface, there exists a corresponding Synchronized_allocator interface wrapper. This technique works well as long as the number of interfaces is low – as is the case for Genode's base API. However, as the wrapper code is for the most part pretty dumb, we'd like to avoid it. Also, when using the Genode API to implement programs on top, we do not anticipate manually creating such accessor wrappers. To ease the creation of synchronized interfaces, we introduced the new Synced_interface class template. It takes a pointer to an existing interface and a lock as arguments. An instance of a Synced_interface provides synchronized access to the wrapped interface functions via the operator (). Because the Synced_interface does not provide any means to obtain the unsynchronized version of the interface, once wrapped, the interface cannot be misused by subsystems that get handed over a reference to a Synced_interface. To see how to employ this utility, please have a look of how we realize the synchronization within the Vancouver VMM (in particular, the access to the motherboard).
Low-level OS infrastructure
TCP/IP performance
On the course of the automated benchmarking described in Section Automated quality-assurance testing, we conducted the following steps to enable benchmarks and to improve performance at the TCP/IP level.
At application level, we desire to compare our network performance with the performance on GNU/Linux using commodity benchmarks. For this reason, netperf has been ported to run as native Genode using the lwIP stack. This benchmark allows us to systematically compare our results with those achieved by Linux. The port of netperf is available in the ports repository.
In addition to running a commodity benchmark, we pursue synthetic benchmarks that model the behaviour of typical application scenarios, for example, a web server that receive many small requests. This is where the added test-ping_client and test-ping_server tests come into play. The test is located at libports/src/test/lwip/pingpong. It is used by the series of network_test_*.run scripts located at libports/run. The run scripts exercise the test in various scenarios and thereby allow us to systematically explore the impact of the libc and NIC bridge on the application performance.
-
Using raw lwIP without the libc
-
Like the first test, but with an instance of the NIC bridge in between the test program and the driver.
-
Using lwIP with the libc socket bindings
-
Like the third test, but with NIC bridge added
To keep track of the lwIP development more closely, we switched to the Git version of lwIP instead of using a source snapshot.
Furthermore, we incorporated "window scaling" support (RFC 1323) into our version of lwIP as we identify the TCP window size as a limiting factor of the TCP throughput achieved via lwIP.
C runtime
We added support for "resolv" functionality to the libc_lwip_nic_dhcp plugin. Normally, a file called resolv.conf is expected to be located at /etc. On Genode, however, we don't have a global file system, which makes this way of configuration cumbersome. To ease the provision of a simple default resolv.conf configuration, the plugin hands out the file as a virtual file. The configuration automatically provides the DNS server address acquired by lwIP via DHCP. If, for some reason, this policy is not desired, the feature can be disabled via:
<libc resolv="no" />
Note that the configuration of the C runtime has changed
To foster consistency of the libc configuration, we moved the static network "interface" attributes into the libc XML node. A new configuration of static networking would look as follows:
<libc ip_addr="..." netmask="..." gateway="..." />
Terminal
Genode's custom terminal implementation has been improved to better handle widely used escape sequences. The new version is able to handle two-argument SGR commands with attribute/color arguments in any order, and supports the ED, EL0, and CUB commands.
Because the terminal classes do not rely on any 3rd-party code, they have been moved to the os repository at os/include/terminal. This way, we can use those classes by other components of the os repository such as the new CLI monitor.
FS-LOG service
Using the new FS-LOG service residing at libports/os/src/server/fs_log, log messages of different processes can be redirected to files on a file-system service. The assignment of processes to files can be expressed in the configuration as follows:
<start name="fs_log">
<resource name="RAM" quantum="2M"/>
<provides><service name="LOG"/></provides>
<config>
<policy label="noux" file="/noux.log" />
<policy label="noux ->" file="/noux_process.log" />
</config>
</start>
In this example, all messages originating from the noux process are directed to the file /noux.log. All messages originating from children of the noux process end up in the file /noux_process.log.
Liquid FB
Liquid FB is a virtual framebuffer service that uses the nitpicker GUI server as back end. The virtual framebuffer is presented as a movable window with a title bar. Until now, we used it primarily for demonstration purposes, i.e., it is part of Genode's default demo scenario.
Thanks to our forthcoming adaptation of Qt5 to Genode, which requires a very similar solution to interface Qt5's platform-abstraction layer (QPA) to Genode, liquid FB got in the spotlight of this release.
First, we took the chance to update its configuration parameters to become more consistent with similar services such as nit_fb. As liquid_fb was originally conceived at a time when Genode's XML parser did not support XML attributes, its configuration syntax used to be a bit arcane. This has changed now. Apart from this cosmetic refinement, there are two prominent new features: Support for resizing the framebuffer window with the mouse and support for dynamic reconfiguration of the virtual framebuffer via Genode's configuration mechanism.
When the liquid FB window gets resized by the user, the virtual framebuffer emits a mode-changed signal to its client, which, in turn can handle the event by re-acquiring the frame-buffer dataspace.
The added support for dynamic reconfiguration allows for changing the properties of a liquid FB instance via Genode's configuration mechanism. For example, the window position and size can be manipulated this way.
Furthermore, two new configuration options have been added. The resize_handle option shows or hides the resize handle widget at the lower-right window corner (by default, it is hidden). The decoration option defines whether window decorations should be visible (default is yes). Both options can have the values "on" or "off".
3rd-party libraries
The following 3rd-party libraries have been added or updated:
-
To complement libSDL, we have added ports of SDL_ttf, SDL_image, SDL_image, SDL_mixer, and SDL_loadso. Those additions to libSDL are used by popular libSDL-based applications such as Tuxpaint. They are now available at the libports repository.
-
GNU FriBidi 0.19.5 added to the libports repository
-
Qt4 updated to version 4.8.4
-
zlib updated to version 1.2.8
Device drivers
Unified driver names
The growing diversity of supported hardware platforms calls for improved conventions of how to name device drivers. Otherwise, run scripts that are meant to support a wide range of platforms will eventually become more and more complicated due to platform-dependent conditional configuration snippets. For example, the default framebuffer drivers of the respective platforms used to be called "vesa_drv" (for x86), "omap4_fb_drv", or "pl11x_drv". In order to support the different platforms, run scripts that were otherwise platform-agnostic had to explicitly deal with those differences.
To solve this issue, we introduced a generic SPEC values for device types, for which a default driver is expected to exist. If a platform features a framebuffer driver, it includes the SPEC value "framebuffer". On each platform, the default driver for the respective device has the same name. So each of "vesa_drv", "pl11x_drv", and "omap4_fb_drv" had been renamed to "fb_drv". This is possible because the use of those drivers is mutually exclusive.
The same convention has been applied to GPIO drivers as well. The corresponding SPEC value is called "gpio". The driver binaries are called "gpio_drv".
ATAPI
LBA48 support has been added to the ATAPI driver. Thanks to Ivan Loskutov!
KDB UART driver for L4/Fiasco and Fiasco.OC
The new KDB UART driver at os/src/drivera/uart/kdb uses the kernel debugger console as backend for input and output. This is useful in the case that only one UART is available as described in Section Terminal infrastructure. Examples for using the kdb_uart_drv are available in the form of the run scripts ports-foc/run/l4linux.run and os/run/kdb_uart_drv.run.
Revised GPIO session interface
The original design of the GPIO session interface enabled the client of a single session to interact with any number GPIO pins. Each function of the interface took a GPIO number as first argument, which addressed the GPIO pin.
To simplify the interface and to enable fine-grained GPIO-assignment policies, the interface has been changed to provide access to a single GPIO pin per session only. At session creation time, the client specifies a single GPIO pin, to which the session refers. This information can be evaluated for the session routing. So access-control policies can be easily implemented per GPIO pin. The server stores the pin as part of the session context and implicitly uses the pin for operations on the session interface.
Furthermore, a generic driver interface for GPIO-class-device drivers has been introduced. The new interface at os/include/gpio alleviates the need to implement the boilerplate code to interface the driver with Genode. The existing GPIO drivers for OMAP4 and i.MX53 are the first beneficiaries of these changes.
Exynos 5 SoC
After principally enabling the Exynos 5 SoC platform in the previous release, we moved on with extending the device-driver coverage of this SoC. In particular, we addressed USB networking, XHCI (USB-3), Gigabit networking over USB-3, eMMC, and SATA.
The development of those device drivers follows our rationale that guided our previous work on the OMAP4 platform. For the USB driver, we employed the device-driver-environment (DDE) approach for reusing the Linux USB stack and the host controller drivers. In contrast, the eMMC and SATA drivers are built as genuine Genode drivers with no 3rd-party code used.
Technically, the addition of Exynos-5 support to our USB driver was an evolutionary step. It required us to add the corresponding EHCI controller and to supply a few additions to the device-driver environment. To simplify the driver, we decided to let the driver rely on the platform initialization as performed by the U-Boot boot loader. Since the initialization is performed during the boot process already, there is no need to do this work twice. Because the platforms supported by the USB driver become more and more diverse, we re-organized the internal structure of the dde_linux repository to keep those platforms well separated. Furthermore, we reworked the memory management of the USB driver to improve the utilization of the available RAM. The new solution employs Genode's concept of managed dataspaces to manage a part of the local address-space layout manually. This helps us to implement a fast translation of driver-local virtual addresses to physical addresses as needed for issuing DMA requests.
The eMMC driver builds upon our protocol implementation for the SD-card protocol, which was originally developed for the OMAP4 SD-card driver. Because we kept the SD-card protocol implementation well separated from the host-controller driver, it was possible to leverage parts of our existing work for the eMMC driver. Because the eMMC protocol is an extension of the SD-card protocol, however, we needed to enhance the protocol implementation accordingly. The extension comprises support for the MMC_SEND_EXT_CSD, MMC_SEND_OP_COND, and STOP_TRANSMISSION commands as well as the MMC detection. The host controller driver was implemented from scratch with the help of I/O access traces gathered from instrumenting the U-Boot boot loader and the Linux kernel. The driver operates the eMMC in high-speed, 8-bit mode at 52 MHz using DMA. The implementation can be found at os/src/drivers/sd_card/exynos5.
The initial version of our new SATA driver for Exynos 5 has been implemented from the ground up. Even though it is at an early stage, it has been successfully tested with a UDMA-133 disk, e.g., our generic block test is passed and the disk can be attached as a block device to an instance of L4Linux.
Freescale i.MX SoC
The support for the Freescale i.MX53 SoC has been extended by a number of devices. All drivers reside in the os repository under the os/src/drivers subdirectory.
The general-purpose I/O (GPIO) driver located at gpio/imx53 implements the revised GPIO-session interface.
The i.MX53 input driver provides support for the input devices featured on the i.MX53 SABRE tablet. The tablet uses an Egalaxy touchscreen and Freescale's MPR121 capacitative touch buttons. Both are supported by the new driver. The driver is located at input/imx53.
The new framebuffer driver for the i.MX53 quick-start board (QSB) as well as the SABRE tablet comes with special support for using the hardware overlay feature provided by the i.MX53 image processing unit (IPU) Access to the overlay is implemented via an IPU-specific extension of the framebuffer-session interface. To combine the driver well with nitpicker using alpha-channels, optional support for double-buffering is provided. The driver is located at framebuffer/imx53.
As an abstraction of platform features that need to be accessed by multiple drivers, a so-called platform driver has been introduced. The platform driver safeguards the access to global resources such as clocks and system-configuration bits. It can be found at platform/imx53.
OMAP4 SoC
The OMAP4 framebuffer driver used to support HDMI only, which was used for connecting a display to the Pandaboard. To make the driver usable on phones and tablets, the driver has been enhanced to support LCD output. Thanks to Alexander Tarasikov for the patch and the insightful story about porting Genode to the B&N Nook HD+ tablet!
USB
The USB driver of the dde_linux repository has received substantial improvements both feature-wise and under the hood.
First and foremost, the Linux device-driver environment, on which the driver is based on, has been updated from kernel version 3.2 to version 3.9 as the latter version includes drivers for recent host controllers such as DWC3 out of the box.
DWC3 is the host controller employed on the Exynos-5-based Arndale platform for USB 3. We added the support needed to operate this controller in XHCI mode and added support for Gigabit networking through the ASIX AX88179 Gigabit-Ethernet Adapter as well as USB storage support.
Apart from extending the device-driver coverage, we revised the driver internally. The back-end allocators for DMA buffers and normal memory have been rewritten to allocate RAM more sparingly. Furthermore, we enabled the USB driver for 64-bit x86 machines and improved the support for HID keyboards, including the application of quirks to cherry keyboards.
Note the change of the USB configuration
With the addition of XHCI, the USB driver supports a growing number of host controllers. In some situations, it is desirable to constrain the driver to a subset of controllers only. For example, on the Arndale platform, we desire to use a dedicated USB stack for XHCI, which operates completely independent from the USB stack accessing USB-2. This way, gigabit networking over USB-3 won't interfere with the operation of USB-2. To make this possible, we added new configuration options to the USB driver. With the new scheme, host controllers must be explicitly enabled in the configuration. Supported config attributes are: uhci, ehci, and xhci. For example, a configuration snippet to enable UHCI and EHCI looks as follows:
<config uhci="yes" ehci="yes">
Updated iPXE device-driver environment
The iPXE device-driver environment was update to the most recent iPXE upstream Git version in order to benefit from upstream improvements of the Intel E1000 NIC driver.
Runtime environments
Vancouver VMM on NOVA
Vancouver is the user-level virtual-machine monitor that accompanies the NOVA hypervisor for hosting unmodified guest operating systems.
The most active line of development is led by Julian Stecklina at TU Dresden via a fork called Seoul. In contrast to the original version of Vancouver, this fork is open for outside contributions. Hence, it represents an ideal platform for those parties with a stake in Vancouver to collaborate, i.e., the NUL userland, the NOVA runtime environment of TUD, and Genode.
In the current state of the transition, the Hip structure from Genode is reused. String functions, which were formerly taken from NUL are now provided by a stripped-down version of the C library called seoul_libc_support. The nul/config.h is replaced by just using a constant value in the one place where the file was needed.
The Genode-specific back ends of Vancouver, as largely introduced with the previous Genode release, have been improved in several respects:
-
CPUID 0x40000000: This instruction is issued by Linux when the KVM guest support is compiled in. We have to return deterministic values to let the Linux kernel survive.
-
Replaced busy thread startup synchronization by proper locking.
-
New locking scheme: We replaced the error-prone manual locking with the use of the freshly introduced Synced_interface for the motherboard and the VCPU dispatcher. Also, all globally visible locks have been removed. They are explicitly passed to subsystems only when needed.
-
Improved PS/2 mouse back-end: The previous version of the PS/2 mouse back end managed mouse-motion events in a strange way, effectively throwing away most information about the motion vector. Furthermore, the tracking of the mouse-button states were missing. So drag-and-drop in a guest OS won't work. The new version fixes those issues. For the transformation of input events to PS/2 packets, the Genode::Register facility is used, which greatly simplifies the code.
L4Linux on Fiasco.OC
We improved the memory management of L4Linux on Genode in two ways. The first improvement is concerned about the upper limit of memory per Linux instance. The corresponding discussion can be found at issue #414. We changed our L4Re emulation library to match the semantics of the original L4Re more closely. Furthermore, we removed a heuristic in the L4Linux kernel, which assumed that all kernel-local addresses above 0x8000000 refer to device resources. In our version of L4Linux, there exist no MMIO resources. In contrary, the virtual addresses above this addresses are used for normal memory. By removing this artificial restriction with regard to the virtual memory layout of the L4Linux kernel, we can host a larger kernel memory area.
The second improvement is concerned with the allocation of L4Linux memory at Genode's core. Until now, L4Linux used to allocate its memory as one contiguous RAM dataspace at core's RAM service. Core tries to naturally align the allocation to improve the likelihood for large-page mappings. So a dataspace is likely to be physically located at a power-of-two boundary larger or equal than the dataspace size. For example, the allocation of a 100 MiB RAM dataspace for a Linux instance will be located at a 128 MiB boundary. If multiple of such allocations happen sub-sequentially, this allocation strategy results in 28 MiB gaps between 100 MiB dataspaces. This memory cannot be used for large contiguous allocations anymore. So even if the available memory capacity is far larger than 100 MiB, an allocation of a 100 MiB block may fail. To relieve this problem, we weakened the requirement for contiguous memory by assembling L4Linux memory from multiple chunks of small dataspaces. For example, by using a chunk size of 16 MiB, core's best-fit allocator will have a better chance to find a more suited position for allocation when aligning the block to a 16 MiB boundary compared to the allocation of a larger block. Furthermore, slack memory can be used more efficiently because smaller gaps (such as a 20 MiB gap) remain to be usable for L4Linux. The discussion of this topic and the individual patch can be found at issue #695.
Furthermore, the L4Linux block driver has been improved to support large partitions.
Platforms
Execution on bare hardware (base-hw)
Raspberry Pi
Principal support for the Raspberry Pi platform has been added to the base-hw kernel. The popular Raspberry Pi board is based on an ARMv6 Broadcom BCM2835 SoC. The current scope of the platform support comprises:
-
IRQ controller driver: Because the interrupt controller uses a cascade of registers, we settled on the following IRQ enumeration scheme. IRQ numbers 0..7 refer to the basic IRQs. IRQ numbers 8..39 refer to GPU IRQs 0..31. IRQ numbers 40..71 refer to GPU IRQs 32..63.
-
The kernel employs the so-called system timer for the preemptive scheduling.
-
Core's LOG messages are printed over the PL011-based UART.
-
The user-level timer driver uses the so-called ARM timer, which is a slightly modified SP804 timer device.
Up to this point, a few device driver are missing to use Genode on the Raspberry Pi in practice, most notably USB.
To build and run Genode on the Raspberry Pi, create a new build directory via the create_builddir tool, specifying hw_rpi as platform.
User-level timer driver for Arndale platform
By adding our new Exynos 5250 PWM timer driver, the base-hw kernel can now be used for executing meaningful scenarios on the Arndale board including the USB stack and networking.
Linux
Until now, Genode on Linux supported x86-based platforms only. The newly added linux_arm platform clears the way to run Genode directly on Linux-based ARM platforms. Genode's entire software stack is supported, including the dynamic linker, graphical applications, and Qt4.
As a known limitations, the libc setjmp()'/'longjmp() doesn't currently save/restore floating point registers.
Build system and tools
The run tool has been enhanced as detailed in Section Automated quality-assurance testing.