
Release notes for the Genode OS Framework 9.11
In contrast to the previous release, which had been mainly about important refinements and optimizations under the hood, the release 9.11 is focused on new features.
Our brand new packet streaming framework enables the efficient communication of bulk data between processes based on a shared-memory protocol and asynchronous signalling. We put this new facility to use for the new NIC session interface. This interface allows us to execute network drivers and network protocol stacks in distinct processes. The most interesting current use case is the new integration of the light-weight IP stack (lwIP) into Genode. The most noticeable platform-related addition is the new support for the ARM architecture to the OKL4 version of the framework.
As with every release, we refined recently introduced features and tightly integrated them into our mainline development. The most prominent of these features is dynamic linking support, which was introduced with the previous release and has now become fully integrated in the framework and the build system. Also our steady improvement of the Linux device-driver environment yields fruit in the form of USB storage support. With regard to Qt4, we are proud to announce the availability of the Qt4/Webkit library on all kernels supported by Genode.
Furthermore, we added the paravirtualized Linux kernel called OKLinux to the official Genode distribution. This variant of Linux can be executed on top of the OKL4 version of Genode and provides a binary-compatible execution environment for Linux programs alongside low-complexity native Genode programs.
This document compiles these and more changes between the versions 9.08 and 9.11 of Genode. It contains new bits of documentation and tries to put our development into a broader context.
Base framework
The base-host platform
We added a new platform repository called base-host to the Genode distribution. This repository contains dummy implementations of platform-specific Genode APIs to enable the compilation of Genode for the host platform. Because the repository provides dummy implementations, most of the generated binaries will not work. However, the repository serves two important purposes. It documents all platform-specific APIs that must be filled out when porting Genode to another platform, and it is the build environment for unit tests executed on the host platform.
Signalling-framework refinements
With our work on the packet-streaming facility described in Section Packet-stream interface, we discovered a not yet supported use case for the signalling framework.
The original implementation expected one or more signal-handling threads to block or poll for signals from potentially different sources and dispatch them in the order of arrival. Such a thread would instantiate one signal receiver associated with potentially many signal contexts (representing different signal sources).
The new use case, however, requires one thread to be able to selectively handle a subset of signal contexts at a time. The API already facilitated this use case by a simple instantiation of multiple signal receivers and let one thread handle signals for one or another signal source by querying the different receivers. Until now, this use case was not supported by the underlying implementation because signals were submitted to signal receivers, which could only hold one pending signal. A signal could only be supplied to a receiver if there was no pending signal already stored at the receiver. Otherwise, signal delivery for the complete process stalled. We have now changed the implementation such that signals are always supplied to signal contexts instead of receivers. This way, the order of signal arrival and signal handling becomes completely decoupled and clears the way for a much more flexible use of the signalling framework.
- Interface changes
Because the capability for signal submission refers to a signal context rather than a signal receiver, we changed the class names of the signal API accordingly. The previously called Signal_receiver_capability is now called Signal_context_capability. We also streamlined the interface of core's SIGNAL service according to this new naming scheme. The latter change, however, is completely transparent at the Genode API level.
C++ runtime improvements
The base framework of Genode is written in C++, but without a C runtime underneath. The C++ support libraries, however, use to depend on certain functions normally provided by the C library. Therefore, Genode has to provide custom implementations of these functions. This C++ runtime environment is encapsulated in the cxx library. We use to complement the cxx library as needed.
One feature that was previously missing is proper synchronization of static constructors. In contrast to constructors of global variables, which are executed by the startup code before any other threads are created, static constructors are executed lazily, potentially by different threads. A typical static constructor looks like this:
Some_object *get_some_object() {
static Some_object o;
return &o;
}
When calling the function get_some_object the first time, The instance of Some_object is constructed at a static memory location. For all subsequent calls of get_some_object, the once created object is not constructed again but reused. This is a very handy alternative to global constructors when objects inter-depend on each other. In contrast to the construction order of global constructors, which is arbitrary, the call order of static constructors is implicitly defined by the code such that object dependencies are recognised. However, because static constructors are executed lazily, they may be called by different threads. The previous version of cxx had no synchronization in place for protecting a static constructor from being concurrently executed by more than one thread, resulting in a recursive_init_error run-time exception.
With the Genode workloads getting more advanced and dynamic, we have seen this condition to trigger and have added proper support for guarded static C++ constructors into the cxx library.
Library-based AVL tree
Our AVL-tree implementation in base/include/util/avl_tree.h is a fundamental data structure for the framework. It is used at numerous places such as memory allocators, address-space layout management, and the server-object framework. Up to now, this implementation was a big template, instantiated for each data type to organize. Moreover, most operations were implemented using inline functions. By statically profiling the layout of Genode's binaries, we observed that this inline code ended up multiple times in the binaries. However, the program logic of all those instances was essentially the same (e.g., how to perform a tree rotation). Only the policy (i.e., the sort criterion) differs. We now have re-implemented the AVL tree as two parts, the actual AVL-tree algorithm, which is independent from any template parameters and resides in a library called avl_tree, and a policy-dependent front-end template class residing in the avl_tree.h header file.
To our delight, this change reduced the average size of Genode's binaries by 10%. For example, the core binary for OKL4 on x86 went from 305 KB down to only 270 KB.
- Interface change
The new AVL-tree implementation comes along with a slight API change. The operation to remove a node from an AVL tree used to be a member function of the Avl_node object to remove. This function is now being provided by the Avl_tree taking an Avl_node as argument. Because the Avl_tree is a container of Avl_node objects, this change makes the AVL tree more consistent with other container classes such as List and Fifo.
Initial support for the ARM architecture
Right from the start of the project, the portability of the framework was a primary concern. This is reflected by the framework's unique capability to seamlessly run on four different kernels. With regard to the portability among different CPU architectures, however, the development was focused on the x86 architecture as this architecture is most common. With the release 9.11, the project moves beyond the x86 architecture by adding support ARM CPUs and an exemplary ARM-based SoC platform, namely GTA01. Because of all current Genode base platforms the OKL4 is the most widely used kernel on ARM-based devices, we have focused our efforts on this kernel first. The base-okl4 repository comes now with support for the ARM-based GTA01 platform as used for the Openmoko project. We choose this platform because it is supported out-of-the-box by the OKL4 2.1.1 distribution. The ARM-specific code that we had to add to the framework is surprisingly little. It covers the assembly startup code for executables, support code for atomic operations, and the platform driver for GTA01. Because the OKL4 kernels provides abstractions for all other CPU-specific peculiarities, the code for all framework libraries and components are the same for ARM and x86. This also includes the C++ startup code and the linker script.
The procedure for trying out the new ARM support with the GTA01 platform using Qemu is decribed at a dedicated Wiki page:
- Genode/OKL4 on the GTA01 platfrom
Both the OKL4 version 2.1.1 and the GTA01 chip are not the most current platforms but this combination turned out to be good as starting point. Because we use OKL4 2.1.1 on a regular basis on x86, using this kernel on ARM is an evolutionary intermediate step towards moving on to more recent kernels.
- Limitiations
-
The platform driver for GTA01 is pretty limited. It is just as a show case for running Genode on the Qemu-neo1973 emulator. The driver is not tested on real hardware.
-
This release contains the initial support, which currently covers the base framework, the os, and the demo repositories. Other repositories such as libc, linux_drivers, and qt4 are not supported yet.
-
Dynamic linking is not yet not supported on ARM
Paravirtualized Linux on Genode/OKL4
OKLinux is a para-virtualized version of the Linux kernel running on top of the micro-kernel OKL4. It enables us to execute Linux applications in the Genode environment side-by-side with low-complexity native Genode applications, which can implement security-critical functions without relying on the high-complexity Linux kernel. Compared with most existing virtualization solutions including Xen and KVM, the trusted computing base for such security-critical components is one or more magnitudes smaller (the OKL4 kernel
+ Genode base framework are less than 30,000 lines of code).
The original code of OKLinux relies on the Iguana framework - a bunch of server components and libraries to simplify construction of applications running on top of OKL4. The new oklinux Genode repository contains a small OKLinux support library, as well as a patch for OKLinux 2.6.23, that replaces Iguana by the Genode framework. Nevertheless, our version of OKLinux stays to be dependent on the OKL4 kernel, meaning that you can only use it in combination with Genode running on top of OKL4.
Usage
If you haven't build Genode for OKL4 yet, please refer to the following document:
- Genode on the OKL4 microkernel
-
This page contains the information on how to build and use Genode with OKL4.
For building OKLinux for Genode, you first need to download and patch the original sources. The top-level makefile of the oklinux repository automates this task. Just issue:
make prepare
Afterwards you need to include the oklinux repository into the Genode build process. Just add the path to this directory to the REPOSITORIES declaration of the etc/build.conf file within your build directory. Now, you can change to your build directory and simply type:
make oklinux
That's all. The bin/ directory within your build directory should now contain a symbolic link to the vmlinux binary. To test your Linux binary, you also need to tweak the config file for init and for the elfweaver tool. You will find examples for this in the config/ directory of the oklinux repository. Moreover, you will need to add a RAM disk file to your setup as OKLinux for Genode only supports RAM disks by now.
RAM disk
OKLinux provides a special block device driver, which uses a RAM disk as backing-store. You can specify your RAM disk file on the kernel command line of Linux by setting the igms_name= parameter. If you use a RAM-disk file that contains only a file system you have to set the root parameter on the kernel command line to /dev/igms0. If your RAM disk contains a whole partition table, state /dev/igms0pn, whereby n stands for the partition number containing the root file system.
Kernel command line
You can state the Linux kernel command line by using the XML config-file of the init node that starts your Linux instance. In addition to the filename and quota within the start section of Linux, you simply add the following:
<config>
<commandline>igms_name=ramdisk root=/dev/igms0p1</commandline>
</config>
Configure Linux
This OKLinux package contains only a minimal Linux configuration. Especially, any hardware drivers are missing, as Genode/OKL4 doesn't allow direct hardware access from Linux. Instead, Linux accesses hardware indirectly through Genode services. The current version of OKLinux comes with stub drivers for connecting Linux to Genode's Input_session, Timer_session, and Framebuffer_session interfaces and we plan to add support for more device classes in the future.
If you want to enable/disable options in Linux, you can simply do so by using the normal Linux build system. You will find the .config file Linux is using within the oklinux/ directory of your build directory. If you don't want to tweak .config directly, you can also change to the oklinux/ directory of your build directory and issue:
ARCH=l4 SYSTEM=i386 make menuconfig
Then you will get the well known ncurses interface.
Troubleshooting
If you run into problems when building OKLinux and you want the build process to be somehow more verbose, you can build OKLinux this way:
VERBOSE_LX_MK=1 make oklinux
Example
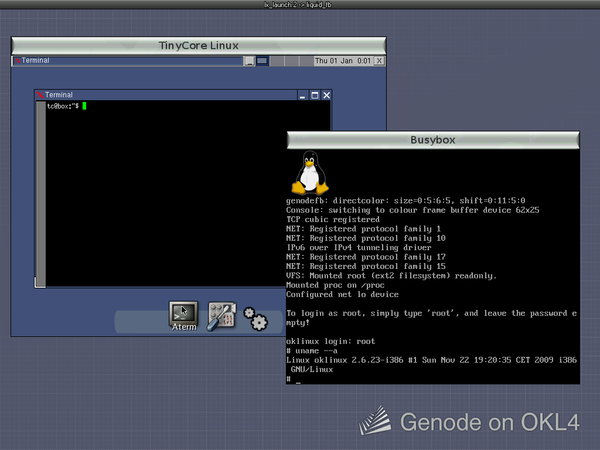
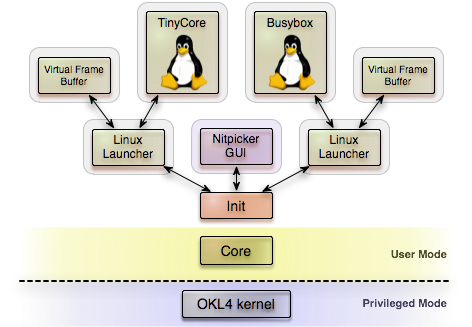
The following screenshot shows Genode running on OKL4 with two instances of OKLinux running. One instance booted the TinyCore Linux distribution including the X Window System. The other instance booted a busybox-based RAM Disk and runs with just about 16 MB of RAM. Each Linux kernel uses a separate instance of the Liquid FB virtual frame buffer:
|
The Genode process tree looks as follows (the figure omits usual Genode components such as device drivers for PCI, PS/2, VESA, and the Timer):
|
The Linux Launcher node is just a slightly modified Init node with the only difference being that requests for sessions to the Nitpicker GUI server or to the timer are always delegated to the parent rather than to another child.
Operating-system services and libraries
Completed support for dynamic linking
With the previous release, we introduced the initial version of a dynamic linker for Genode. This version came in the form of a separate source-code repository called ldso containing the dynamic linker and the linker scripts for building shared libraries and dynamically linked executables. However, some pieces were still missing to make the dynamic linker generally usable in practice. The Genode build system lacked proper support for building and using shared libraries and the dynamic linker had been only tested on the x86_32 platform on Pistachio and OKL4. In the meanwhile, we filled these gaps. With the release 9.11, we completely dissolved the dependency of the dynamic linker from the C library and, thereby, could make the dynamic linker a regular part of the os repository. It now resides in the os/src/ldso directory and supports all Genode base platforms L4/Fiasco, L4ka::Pistachio, OKL4, and Linux on the x86_32 and x86_64 architectures. We are especially delighted about the dynamic linker functioning seamlessly on the Linux platform. Because ldso uses only the Genode API as back end, there are no platform-specific quirks needed.
- Usage
To build a shared library instead of a regular static library, you just need to declare SHARED_LIB = yes in the library-description file. When doing so, a <libname>.lib.so file will be generated and installed in the <build-dir>/bin/ directory. For building an executable that uses a shared library, no special precautions are needed. The build system will automatically detect the use of shared libraries, concludes that the binary must be dynamically linked, and will use the correct linker script. When loading a dynamically linked program, the dynamic linker lsdo and all used shared objects must be loaded as well.
- Integration with the framework
On Genode, the process library provides the API to create new processes from ELF executables. The user of the process library can register a capability to a dataspace containing the dynamic linker via the function Process::dynamic_linker. When creating a new process, the library first revisits the ELF header of the executable to determine whether the binary is statically or dynamically linked. If statically linked, the process library proceeds with loading the ELF binary. Otherwise, it loads the dynamic linker as registered beforehand. When the dynamic linker (ldso) starts up, it requests the dataspace of the dynamically linked executable by opening a ROM session for the magic file called binary. Note that the dynamic linker does not even need to know the real name of executable. Then ldso further loads all shared libraries needed for the executable via ROM sessions with the names of the respective shared object files and populates the local address space. After having initialized the address space for the new executable, ldso jumps to the executable's main function.
Packet-stream interface
Up to now, Genode provides synchronous IPC calls and asynchronous signals as inter-process communication primitives. The IPC framework transfers message payload by copying data between processes via the kernel. The signalling mechanism provides semantics similar to interrupts but does not support the transfer of message payloads. With the new packet-stream interface, we complement those inter-process communication facilities with a mechanism that carries payload over a shared memory block employing an asynchronous data-flow protocol. It is geared towards large bulk payloads such as network traffic, block-device data, video frames, sound samples, and USB URB packets.
The packet-stream interface comes in the form of the single header file os/packet_stream.h and supports the unidirectional streaming of bulk data between processes via a shared-memory block. The public interface consists of the two class templates Packet_stream_source, and Packet_stream_sink. Both communication parties agree on a policy with regard to the organization of the communication buffer by specifying the same Packet_stream_policy as template argument.
|
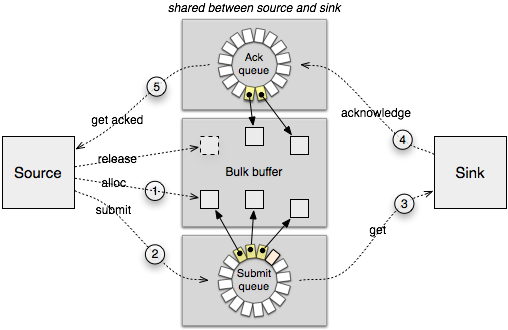
As illustrated in the Figure above, the communication buffer consists of three parts, a submit queue, an acknowledgement queue, and a bulk buffer. The submit queue contains packets generated by the source to be processed by the sink. The acknowledgement queue contains packets that are processed and acknowledged by the sink. The bulk buffer contains the actual payload. The assignment of packets to bulk-buffer regions is performed by the source.
The interplay between source and sink for processing a single packet looks as follows:
-
The source allocates a region of the bulk buffer for storing the packet payload using alloc_packet. It then requests the local start address of the payload using packet_content and fills the packet with data
-
The source submits the packet to the submit queue via submit_packet
-
The sink requests a packet from the submit queue using get_packet, determines the local start address of the payload using packet_content, and processes the contained data
-
After having finished the processing of the packet, the sink acknowledges the packet using acknowledge_packet, placing the packet into the acknowledgement queue
-
The source reads the packet from the acknowledgement queue and releases the packet using release_packet. Thereby, the region of the bulk buffer that was used by the packet becomes marked as free.
This protocol has four corner cases that are handled by signals:
- submit queue is full
-
when the source is trying to submit a new packet. In this case, the source blocks and waits for the sink to remove packets from the submit queue. If the sink observes such a condition (calling get_packet on a full submit queue, it delivers a ready_to_submit signal to wake up the source.
- submit queue is empty
-
when the sink tries to obtain a packet via get_packet. The sink is going to block. If the source places a packet into an empty submit queue, it delivers a packet_avail signal to wake up the sink.
- acknowledgement queue is full
-
when the sink tries to acknowledge a packet using acknowledge_packet. The sink is going to block until the source removes an acknowledged packet from the acknowledgement queue and delivers a ready_to_ack signal.
- acknowledgement queue is empty
-
when the source tries to obtain an acknowledged packet using get_acked_packet. In this case, the source will block until the sink places another acknowledged packet into the empty acknowledgement queue and delivers a ack_avail signal.
These conditions can be avoided by querying the state of the submit and acknowledge buffers using the functions packet_avail, ready_to_submit, ready_to_ack, and ack_avail.
If bidirectional data exchange between two processes is desired, two pairs of Packet_stream_source and Packet_stream_sink should be instantiated.
NIC-session interface
The NIC session interface is the first application of our new packet stream facility. It allows executing network drivers as separate processes rather than linked against the network protocol stack. A NIC session consists of two packet streams, the transmission stream (TX) for sending packets and the reception stream (RX) for receiving packets. Furthermore, each NIC session comprises a simple RPC interface for requesting the MAC address of the network adaptor and for defining signal handlers for the signals TX ready-for-submit, TX acknowledgements-available, RX ready-to-ack, and RX packet-available. By default, those signals are handled by default signal handlers contained in blocking packet-stream functions. However, it is possible to override the data-flow handlers to implement semantics similar to the POSIX select function, for example to wait for all possible signals of multiple NIC sessions using only a single blocking function. You can find the NIC-session interface as part of the os repository at os/include/nic_session/.
Light-weight IP stack (lwIP)
Our port of the light-weight IP stack (lwIP) builds upon the foundation laid with the NIC-session interface.
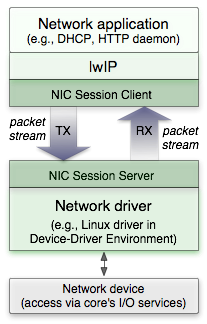
The following Figure illustrates the integration of a networking application with lwIP that uses the NIC-session interface as back end.
|
The port of the lwIP stack resides in the new libports repository described in Section New libports repository. It comes with two examples, a loopback demonstration and a minimalistic HTTP server. The examples are located at the libports repository at src/test/lwip/. The lwIP back-end acts as a client of the NIC-session interface. For the server counterpart, we added a DDE-Linux based stand-alone network driver for PCnet32 to the linux_drivers repository.
For starting the HTTP-server test on L4ka::Pistachio, OKL4, and L4/Fiasco, the following config file can be used:
<config>
<start>
<filename>timer</filename>
<ram_quota>512K</ram_quota>
</start>
<start>
<filename>pci_drv</filename>
<ram_quota>512K</ram_quota>
</start>
<start>
<filename>nic_drv</filename>
<ram_quota>512K</ram_quota>
</start>
<start>
<filename>lwip_httpsrv_test</filename>
<ram_quota>1M</ram_quota>
</start>
</config>
For trying out the example with Qemu, please refer to the instructions given in the description of the initial networking support added in Genode version 9.02.
MMX-based 2D blitting library
Previous Genode releases already featured a 2D blitting library with a MMX-based optimization for x86_32. This optimization, however, was not enabled by default. Starting with the current release, several graphics-related parts of Genode will profit from our revisited version of this library, which is now enabled for both x86_32 and x86_64 by default. From this change, you can expect a definite performance boost of the Nitpicker GUI server and all Scout-widget-based applications such as the tutorial browser and launchpad. The library interface is located at os/include/blit/blit.h. On architectures with no MMX, a generic implementation of the interface is used as fall back, which makes it safe to use the blit interface for developing portable applications.
Zero-footprint runtime for Ada/Spark
At Genode Labs, we are exploring the use of the Spark subset of Ada to implement security-critical code and use Genode as development platform. For this reason, we have added support for executing freestanding Ada code on Genode. An example of the use of Ada on Genode can be found at base/src/test/ada.
The program relies on the normal startup procedure of a Genode process. Execution starts at the crt0 assembly entry provided by the startup library. The crt0 code sets up the stack of the main thread and calls the _main function implemented in the C++ portion of Genode's startup library. In turn, the _main function calls main of the actual program. The main function of this example calls the Ada main procedure. The test further exercises the call of C functions from Ada code. So the integration of Ada and C code is almost seamless.
For building the Ada test program, you must have installed the GNU GNAT Ada compiler. Right now, we are using the host version of this compiler, which is save as long as we do not use advanced Ada features such as exceptions. To enable building the test program, add gnat to the SPECS declaration of your <builddir>/etc/specs.conf. Otherwise, the Genode build system will skip the target.
Please note that the current version of this program does not use gnatbind. Therefore, package elaboration is not executed.
Misc improvements of OS-level services and libraries
- Init
-
Fixed quota-limitation problem in init. There was a race between the call of env()->ram_session()->avail_quota() and already running children that donated quota via init to a server. During the quota transfer, child quota gets temporarily transferred to init to be further transferred to the server. In the worst case, such temporary quota was then assigned to the last child when limiting its quota to avail_quota(). We solved this problem by deferring the start of child programs until all quota calculations are finished.
- Nitpicker GUI server
-
Prevent superfluous screen updates when switching clicking on different views of the same session, making the GUI more responsive.
New libports repository
With proper shared-library support in place and with our C runtime getting more and more mature, we feel an increased desire to port existing popular libraries to Genode. For this purpose, we have now introduced a dedicated source-code repository called libports. Following the approach taken with our Qt4 porting effort, this repository does not contain actual source code but a mechanism to download upstream library source codes and adapting them to Genode. This way, we can easily keep track of the adaptions needed for Genode and update libraries to later versions.
- Usage
At the root of the libports repository, there is a Makefile automating the task of downloading and preparing the library source codes. By just typing make, you get an overview of the available libraries and further instructions.
In the common case, you might just want to prepare all libraries by issuing:
make prepare
Alternatively, you can select one particular library to prepare by specifying the base name of a library (wihout the version number) as command-line argument:
make prepare LIB=freetype
After having prepared the libports repository, we are ready to include the repository into the build process by appending it to the REPOSITORIES declaration of your <build-dir>/etc/build.conf file.
- Under the hood
For each library, there is a file contained in the libports/ports/ subdirectory. The file is named after the library and contains the library-specific rules for downloading the source code and installing header files.
For reference, we have included ports of Freetype2 and Jpeg. Note that currently, these ports serve mainly the purpose of illustrating the use of the libports repository and are not thoroughly tested. However, we have successfully used them with Qt4.
- How does libports relate to the other repositories?
The libports repository is meant as a place for porting popular libraries that usually expect a POSIX-like environment - similar to the environment provided by Genode's libc repository. So libports depends on libc and, consequently, on the repositories libc depends on, most specifically the os repository. Because the dynamic linker is now a regular part of the os repository, libraries contained in libports can (and should) be built as shared libraries.
Device drivers
Device-driver environment
We steadily improve our device-driver environment for executing Linux drivers directly on Genode. For this release, we updated the Linux environment to the Linux kernel version 2.6.20.21, and improved several parts of the Linux-specific code, in particular the handling timers and tasklets.
In the DDE Kit, we made the free() function compatible with C99 (accepting a NULL pointer as argument) and fixed a memory leak.
USB storage
We extended our USB stack with the driver infrastructure needed for accessing USB storage devices. The USB stack is ported from the Linux kernel using the Linux device-driver environment. Our Genode-specific support code consists of two parts:
-
We added emulation code for the Linux SCSI protocol layer as relied on by the Linux USB stack. The currently supported SCSI commands are INQUIRY, READ_10, WRITE_10, and READ_CAPACITY. Furthermore, we added a custom block interface at linux_drivers/include/dde_linux26/block.h, which still has a number of limitations (thread safe, synchronous, single block r/w requests only).
-
For the file-system layer, we ported the FatFs R0.07e library to Genode. This library allows us to access the directories and files of the FAT file system on the USB device. It has been ported using our new libports repository.
The new USB storage support can be tested using a test program supplied with the linux_drivers repository. It runs on all base platforms except on Linux. The source code of the test is located at src/src/test/dde_linux26_usbstorage. For compiling, you need to download the libffat first. From the libports repository, you can issue:
make prepare LIB=ffat
Furthermore, you must ensure that both the libports and linux_drivers repositories are specified in the REPOSITORIES declaration in your <builddir>/etc/build.conf file. Because of the dependency of the USB-storage test from libffat, the program is not built by default until explicitely enabled by stating that libffat is available. This must be done by extending the SPECS variable in your <builddir>/etc/specs.conf:
SPECS += libffat
After these preparations, you can build the test program from your build directory:
make test/dde_linux26_usbstorage
For executing the test, you need to specify Genode's timer and pci_drv alongside the test-dde_linux26_usbstorage program. The test program will access an attached USB storage device, output the root directory content and load the first 16 bytes of the first file. You can try this out on Qemu by using a virtual USB storage device. First create a disk image with a FAT file system:
dd if=/dev/zero of=<usb-device-file> count=2048 mkfs.vfat <usb-device-file> mount -oloop <usb-device-file> <mount-dir> cp <some data> <mount-dir> umount <mount-dir>
Then you can attach this disk image to Qemu using the arguments -usb -usbdevice disk:<usb-device-file>.
PS/2 mouse and keyboard driver
We improved Genode's native PS/2 driver to be more robust against delays at startup. During the time after the startup of the PS/2 driver until a client connects, incoming input events used to fill up and eventually overflow the event queue. Now, we start sampling input events only after a client connects to the PS/2 driver.
Furthermore, we have added support for the Intellimouse ImPS/2 and ExPS/2 protocol extensions to support mice with a vertical scroll wheel and 5-button mouses. The improvement required no changes of the Input::Event interface. Scroll-wheel events are reported as WHEEL events with the wheel count delivered as ry value. The buttons correspond to the key codes BTN_LEFT, BTN_RIGHT, BTN_MIDDLE, BTN_SIDE, BTN_EXTRA.
Regarding the keyboard driver, we do not print messages on the occurrence of key-repeat events any longer. These messages tended to significantly slow down keyboard-based applications such as the OKLinux console.
NIC driver implementing the NIC-session interface
We added a new NIC driver using the Linux Device Driver Environment, which implements the server side of the new NIC-session interface described in Section NIC-session interface. The currently used Linux driver is pcnet that is implemented in Qemu. Nevertheless, it should be straight forward to add other Linux network drivers the same way.
Qt4 and Webkit
We have extended our Qt4 port with Webkit support, which is one of the most complex components of Qt4. One particularly interesting point was the dependency of the JavaScript engine from the C++ standard template library. The Genode tool chain, however, already features the STL headers, which worked out nicely once we figured out a way to wrest the information about the STL header location from the compiler.
Because Qt4 applications have exceedingly large binary sizes relying on static linking, we put Genode's newly available shared-library support to good use by declaring all Qt4 libraries as shared objects. This way, Qt4 applications have now become reasonably small. For example, the binary of the Tetrix example went from over 10MB down to about 600KB.
Since the Genode release 9.11, Qt4 depends on the libports repository, specifically on the freetype2 and jpeg libraries. Please make sure that you called the top-level Makefile of the libports repository for those preparing those libraries and that your REPOSITORIES declaration contains the libports repository.
Applications
Seamless Xvfb integration into Genode on Linux
Xvfb is a virtual X server that uses a plain file as frame buffer instead of a physical screen. The xvfb glue program makes an Xvfb session available to the Linux version of Genode such that both native Genode programs and X clients can run seamlessly integrated in one Nitpicker session. Using the xvfb glue program contained in the os/src/app/xvfb directory. Because Xvfb is executed as Nitpicker client, it is possible to integrate multiple instances of Xvfb into the same Nitpicker session.
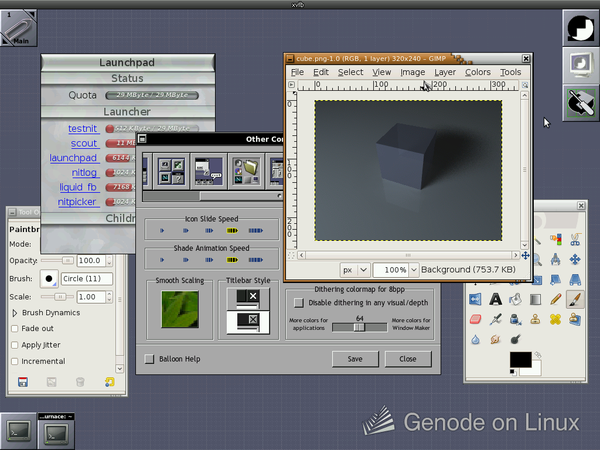
|
The scenario above uses two instances of Xvfb, which are displayed by the Nitpicker GUI server executed on Genode. Each Xvfb process is connected to Genode via a xvfb adaptor program, which is hybrid using both the Linux API (for accessing the virtual frame buffer and performing its role as X client) and the Genode API (for its role as Nitpicker client).
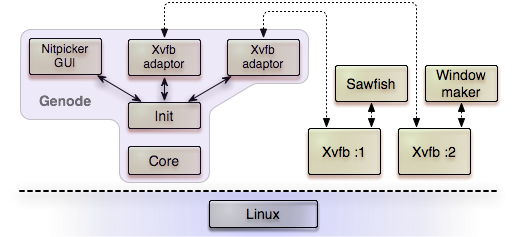
|
- Preconditions for compiling
The xvfb adaptor tracks dirty screen regions using the X damage extension and injects user-input events into the X server using the X test extension. So you need the development packages of both extensions to compile it. The Debian package for the X damage extension is called libxdamage-dev. The X test extension is normally installed by default or resides in a package called libxtst-dev. Furthermore you need to enhance your SPECS declaration in your <builddir>/etc/specs.conf file as follows:
SPECS += x11 xdamage xtest
- Usage
First start Xvfb using the following command-line arguments:
Xvfb :1 -fbdir /tmp -screen 0 1024x768x16
While Xvfb is running, /tmp/Xvfb_screen0 will contain the content of the X server's frame buffer. This file must be specified for the xvfb declaration in the config file. In addition, the display of X server instance must be declared via the display tag. For example:
<config> <display>:1</display> <xvfb>/tmp/Xvfb_screen0</xvfb> </config>
- Known Limitations
-
With the current version, some key codes are not mapped correctly.
-
The screen mode of Nitpicker and the Xvfb session must be the same. Only modes with 16bit color depth are supported.
Backdrop application
For the Genode Live CD, we added a simple backdrop application to the demo repository, residing in src/app/backdrop. It uses libpng to display a PNG image as background of the Nitpicker GUI server.
- Usage
You have to specify the name of the PNG file to be used as background image via a declaration in your config file:
<config> <image>background.png</image> </config>
- Limitations
The PNG file is expected to be equal to the screen size. No scaling or tiling is supported.
Extended configurability of native applications
- Launchpad
By default, launchpad displays a preconfigured list of programs and their respective default memory quotas. The user can tweak the memory quota for each entry with mouse and then start a program by clicking on its name. As an alternative to using the default list, you can define the list manually by supplying a configuration to Launchpad. The following example configuration tells launchpad to display a list of two launcher entries:
<config>
<launcher>
<filename>sdl_pathfind</filename>
<ram_quota>10M</ram_quota>
</launcher>
<launcher>
<filename>liquid_fb</filename>
<ram_quota>10M</ram_quota>
</launcher>
<launcher>
<filename>init</filename>
<ram_quota>10M</ram_quota>
<config>
<start>
<filename>hello</filename>
<ram_quota>1M</ram_quota>
</start>
</config>
</launcher>
</config>
To use this configuration for a Launchpad started via init, you can simply insert the launchpad configuration into the <start> node of the launchpad entry in init's config file.
- Liquid frame buffer
Liquid frame buffer is an implementation of the frame buffer interface running as a client of the Nitpicker GUI server. It supports the following configuration options. The example shows the default values.
<config>
<!-- enable the animated background,
valid values or 'on' and 'off' -->
<animate>on</animate>
<!-- the initial window position and
size of the virtual frame buffer -->
<x>400</x>
<y>270</y>
<width>500</width>
<height>400</height>
<!-- set the window title -->
<title>Liquid Framebuffer</title>
</config>
Because Liquid frame buffer creates the virtual frame-buffer window at start time, not at session-creation time, sufficient memory resources must be provided when starting the program. Consequently, the client does not need to donate memory for the frame buffer backing store.
Liquid frame buffer supports only one client. If multiple virtual frame buffers are needed, multiple instances of the program should be used.
Misc improvements of native applications
-
Fixed keyboard handling in Liquid FB, now all keyboard events are directed to the window content, which makes Liquid FB more appropriate for hosting an OKLinux console.
-
Replaced slow pixel copy code of the scout widget set with the MMX-based 2D blitting library and thereby improved the graphics performance of applications such as launchpad, liquid FB, and scout.
-
Defer creation of Nitpicker view to the first buffer refresh. This avoids artifacts when moving the mouse over designated view area during at the startup of a scout application.
Platform-specific changes
- L4ka::Pistachio
We further extended our work regarding write-combined access to I/O memory to the L4ka::Pistachio base platform. So this platform can now also enjoy the performance boost that we experienced on the L4/Fiasco platform when enabling write-combined I/O for the frame buffer.
- Linux
To enable the dynamic linker to work on Linux the same way as on the other platforms, we enhanced the Linux-specific local region manager to handle an optional local address and offset when attaching a dataspace.
Thread destruction on Linux works asynchronous by a sending a signal via the tgkill system call to the thread to be killed. Unfortunately, the Linux kernel delivers signals only in the kernel-entry path. This means that after calling tgkill, the to-be-killed thread still moves on until it enters the kernel (either by issuing a system call or when being preempted). This has the side effect that the thread continues to access its stack for a while. If killing a thread in the local address space and immediately freeing the stack of the killed thread by using the munmap system call, the process would ultimately receive a segmentation fault. To solve this problem, we need to ensure that the to-be-killed thread is really not executing any instructions anymore before freeing the stack. We do this by repetitively issuing tgkill for the thread until an EINVAL error is returned.
- OKL4
We changed the serial output of core to use the OKL4 kernel debugger for printing the output of core instead of poking the comports directly. This way, the console is not anymore x86-specific but platform-independent.
Build system
-
For debugging Genode applications using the GDB stub of Qemu, applications should use distinct virtual memory ranges. Otherwise, breakpoints set in one program would trigger when another program accesses the breakpointed virtual address. Therefore, we have introduced the LD_TEXT_ADDR variable to the build system. A value assigned to this variable in a target.mk file overrides the default link address.
-
The integration of dynamic linking support into the build system led to some architectural changes. Most importantly, the final linking stage is now performed by a separate make instance executing base/mk/link.mk. However, this change has no implications on the use of the build system.
-
Generate symbols for marking the end of binary data linked via the SRC_BIN mechanism. The start and end of binary data are marked by the symbols _binary_<name>_start and _binary_<name>_end.
-
Use AS_OPT also for linking binary data, which is important to make the resulting object file always compatible with the compiled objects. This is important on architectures with non-unified calling conventions.