
Release notes for the Genode OS Framework 9.05
Shortly after including support for the L4ka::Pistachio kernel in the previous release, the Genode version 9.05 gives a further evidence of Genode's high portability by making the framework available on top of the OKL4 kernel. This kernel is a commercial-grade microkernel developed by Open Kernel Labs. In Section Supporting the OKL4 kernel as new base platform, we elaborate on the new base platform and summarize the experiences made during our porting work.
The previous Genode release was accompanied by a source-code archive containing the initial version of Qt4 for Genode. Our approach is to make the Qt4 framework available for building Genode applications running natively on the microkernel rather than within a virtualization environment. As advertised in our road map, we have now seamlessly integrated the Qt4 framework into our mainline source tree. Furthermore, we have adapted our port to the Qt4 version 4.5.1. Section [Integration of Qt4 into the mainline repository] gives a rough overview of the changes and an introduction on how to use the Qt4 framework with Genode.
The third major feature of the release is the addition of preliminary USB support. We have been able to port major parts of Linux' USB infrastructure to Genode using the DDE Kit introduced in autumn 2008. Section USB support presents an overview about the pursued design and the current state of implementation.
Section OKLinux on Genode outlines our ongoing efforts of running Linux as a node in Genode's process tree.
Supporting the OKL4 kernel as new base platform
The OKL4 kernel developed by Open Kernel Labs started as a fork of the L4ka::Pistachio kernel. Whereas L4ka::Pistachio remained true to the L4 x.2 specification, OKL4 was subject of major API changes geared towards high performance on the ARM architecture. OKL4 earned much fame for executing a user-level variant of Linux (OKLinux) on top the microkernel, which turned out to be faster than executing Linux natively on the ARM9 architecture. Even though OKL4 is primary targeted at the ARM architecture, we wanted to go for the x86 variant because of two reasons. First, there exists the just mentioned user-level port of Linux for OKL4, which looks like an attractive way to execute Linux on Genode once Genode runs on OKL4. Second, we think that distributing Genode in the form of ISO images bootable on plain PC hardware is the best way to reach the OS community. Therefore, we decided to use OKL4 version 2.1 as the base for our work. In contrast to later releases, this version supports both x86 and ARM. The following section reviews the unique features of the OKL4 kernel from our perspective.
OKL4 viewed from the angle of a Genode developer
On the kernel-API level, OKL4 has several interesting properties that had been both welcome and challenging. We want to highlight the following points:
In contrast to prior L4 kernels, OKL4 has removed wall-clock timeouts from the kernel interface. On L4, timeouts were used as arguments for for blocking IPC operations serving two purposes. First, specifying IPC timeouts allowed the IPC caller for regaining control over the blocking thread after the specified time elapsed. This is considered as important in the case that the called thread misbehaves and never answers the call. However, the problem of choosing an appropriate timeout was never properly resolved. When dimensioning the timeout too small, the called thread may miss the timeout just because it had no chance to be selected by the scheduler in time. Such timeouts rely on the presumption that there is low load on the system. On the other hand, when dimensioning the timeout too high, the system will become sluggish when the called thread misbehaves. For example, a simple GUI server may want to send input events to its clients with a timeout to be robust against misbehaving clients that never wait for events. When choosing a timeout too small, chances are high that an event will occur at a time when the receiver is handling a previous event. The timeout would trigger and the event would get lost. When choosing the timeout too large, say 1 second, any misbehaving client could make the GUI server freeze for 1 second. Therefore, timeouts for regaining control over a blocked thread seem to be a bad idea. So we welcome their absence in OKL4. The second use of timeouts is their use as user-level time source. On L4, sleep is typically implemented as a blocking IPC with a timeout set to the sleep value. For this purpose, a system built on top of OKL4 has to employ a user level device driver accessing a timer device. In Genode, we already have a timer service for this purpose. So we won't miss timeouts at all.
Classical L4 kernels provide two variants of synchronous IPC. So called long IPC could copy any amount of memory from the sending to the receiving address space. This is complicated operation because either communication partner may specify communication buffers that contain unmapped pages. Hence, page faults may occur during long-IPC operations. On L4, page faults, in turn, are handled by the user land. Not until a user-level pager thread resolves the page fault by establishing a mapping at the faulting address, the kernel can proceed the IPC operation. This sounds pretty complicated, and it is. The second IPC variant is called short IPC. It constrains the transferable payload to CPU registers. Hence, these IPC operations should only be used for messages with a payload of a maximum of 2 machine words. Because short IPCs are never touching user-level memory pages, no page faults can occur. On OKL4, there is only one IPC operation, which copies payload from the sender's user-level thread-control block (UTCB) to the receiver's UTCB. An UTCB is an always-mapped memory region. Hence no page faults can occur during IPC operations. On Genode, the UTCB size of 256 bytes may become a limitation when RPC messages get large. For example, session requests may include large session-argument strings specifying session-constructor arguments. Current services rely only on a few arguments so the size limitation is not an apparent problem. But that may change for future services. Furthermore, in contrast to L4 x.2, OKL4 does not allow for transferring payload other than plain data. In particular, OKL4 does not support the transfer of memory mappings via IPC. Removing memory mappings from the IPC operation is a very good idea. On Genode, only roottask (core) establishes mappings and shared memory is implemented as a user-level protocol (data spaces). There is no need to allow arbitrary processes to establish memory mapping via IPC.
The boot procedure of OKL4 largely differs from other L4 kernels. This is attributed to Open Kernel Labs' focus on embedded systems, which mostly rely on single-image boot loading. OKL4 employs a tool (elfweaver) for creating a bootable image from a bunch of files and an XML configuration file. Among the declarations about which processes to be loaded and which policies to enforce, the configuration file contains platform parameters such as the amount of physical memory of the machine. This static approach to configure a system is certainly useful for embedded systems but PC hardware uses to vary a lot. In this case, evaluating boot-time memory descriptors would be the preferred solution.
OKL4 introduces kernel support for user-level synchronization. Prior L4 kernels facilitated user-level synchronization through a combination of synchronous IPC operations with either priorities or delayed preemption. OKL4's mutexes can make the life in the user land much easier. However, we have not looked into OKL4 mutexes yet.
There does not exist a recursive map operation as the source operand of the map operation is a physical memory descriptor rather than a virtual address in the mapper's address space. Consequently, this design eliminates the need for having a recursive unmap operation and thereby, the need to maintain a mapping data base in the kernel. This is cool because Genode keeps track of the mappings at the user level anyway (within core). From our perspective, there is no need to maintain mapping relationships in the kernel. Removing the mapping database effectively discards a lot of much-discussed problems about how to manage the mapping database in a clever way.
There exists no root memory manager (sigma0). Because the map operation takes a physical memory descriptor as argument instead of a virtual address in the mapper's address space. The mapper does not need to have the mapped page locally mapped within its own address space. In fact, core (as the only mapper in a Genode system) does only have very little memory mapped locally. This design accelerates the boot time because there is no need to map each physical page in core at startup as performed when running core on the other L4 kernels.
These differences of OKL4 compared with the microkernels already supported by Genode posed a number of interesting challenges and opportunities. We have thoroughly documented the process in Bringing Genode to OKL4.
Usage
For using Genode with OKL4, please refer to the following dedicated page:
- Genode on the OKL4 microkernel
-
Site about building and using Genode with the OKL4 kernel.
Limitations of the current implementation
The current implementation is able to execute the complete Genode demonstration scenario on OKL4. This means, we can build and destroy arbitrary trees of processes, have all the needed infrastructure in place to execute user-level device drivers such as VESA and PS/2, perform inter-process communication via RPC and shared memory, and have all basic framework API functions available. We regard the current state as the first functional version. However, there are the following points that need improvement and are subject to our future work.
- Incomplete timer driver
-
On x86, the timer driver should program the PIT to dispatch sleep requests. However, the I/O ports of the PIT can only by made available to one party in the system (which naturally would be the timer driver). Unfortunately, there are some VESA BIOSes around, which try using the PIT directly. The current version of our VESA driver does not virtualize these accesses. It rather tries to gain direct access to the I/O ports from core. This would not work if the timer already uses this device resource. Our plan is to supplement our VESA driver with a virtual PIT that uses the timer service as back end. Then we can safely use the PIT by the timer driver.
- Signalling framework not yet implemented
-
We have not yet implemented Genode's API for asynchronous notifications in the OKL4 version. In fact, the goal of the initial version of the OKL4 support was running the default demonstration scenario, which does not rely on signals. The second and more technical reason is that we consider exploiting OKL4's event mechanism for implementing the signalling API but have not finalized the design. The generic implementation as used on the other platforms cannot be used on OKL4 because this implementation utilizes one helper thread per signal transmitter. Within core, each RM session is a potential signal transmitter, which means that we need to create a helper thread per process. Unfortunately, by default, OKL4 limits the number of threads within roottask (core) to only 8 threads, which would impose a severe limit on the number of processes we could run on OKL4.
- OKL4's kernel mutexes yet to be used
-
We have not yet explored the use of mutexes provided by the OKL4 kernel for implementing Genode synchronization APIs but we rather rely on a yielding spin lock for now. This has a number of drawbacks such as high wake-up latencies in the contention case (depending on the scheduling time slice), no support for priorities, and no fairness. Although it is a simple and robust solution to start with, we plan to facilitate the OKL4 kernel feature with our upcoming work.
- Overly simplistic UTCB allocation
-
Right now, we allocate a fixed amount of 32 UTCBs per address space and thereby limit the maximum number of threads per process. In the future, this limit should be made configurable.
- Managed dataspaces not yet supported
-
The support of managed dataspaces relies on the signal API, which is not yet available for OKL4.
- Message buffers are limited to 256 bytes
-
Because OKL4 performs message-based inter-process communication by copying data between the UTCBs of the communicating threads, the UTCB size constaints the maximum message size. Therefore, message must not exceed 256 bytes. This is not a huge problem for the currently available Genode programs but we can imagine session argument-lists to become larger in the future.
- Advanced thread functions are incomplete
-
Thread functions such as querying registers of remote threads are not yet implemented.
Integration of Qt4 into the mainline repository
Qt4 is a tool kit for developing platform-independent applications. It comprises a complete platform-abstraction layer and a rich GUI tool kit widely used for commercial and open-source applications. It is particularly known as the technical foundation of the KDE project. The previous Genode release was accompanied by a snapshot of our initial port of Qt4 to Genode. For the current release, we have turned this proof-of-concept implementation into a properly integrated part of the Genode mainline development. This enables Qt4 applications to be executed natively on the full range of kernels supported by Genode.
Usage
We complemented Genode's source tree with the new qt4 source-code repository, which contains the Genode-specific parts of the Qt4 framework. The most portions for the Qt4 framework are used unmodified and thereby have not been made part of the Genode source tree. Instead, we fetch the original Qt4 source code from Trolltech's FTP server. This way, our source tree remains tidy and neat.
For using Qt4 for your Genode applications, you first need to download and prepare the original Qt4 source codes and build a few Qt4 tools such as the meta-object compiler and the resource compiler. The makefile found in the top-level directory of the qt4 repository automates this task:
make prepare
To include the qt4 repository into the Genode build process, just add the qt4 directory to the REPOSITORIES declaration of the etc/build.conf file within your build directory. Make sure that the repositories demo and libc are included as well. The qt4 repository comes with a couple of demo applications. The qt_launchpad is especially interesting because it makes use of both the Qt4 framework and the Genode framework in one application.
Features and limitations
The Qt4 port comprises Qt's Core library, GUI library, Script library, XML library, and the UI tools library.
For using Qt4 on the Linux version of Genode, we recommend using the Genode tool chain rather than your host's tool chain. Qt4 makes use of a lot of libc functionality, supplied by Genode's libc repository. However, on Linux we still link against your host's libc. This becomes a problem if your host compiler's C++ support code references libc functionality that is not part of Genode's libc. Thereby the linker will silently create references to glibc symbols, making both libraries collide. So if using Qt4, we recommend using the Genode tool chain:
- https://genode.org/download/tool-chain
-
Information about downloading and using the Genode tool chain
USB support
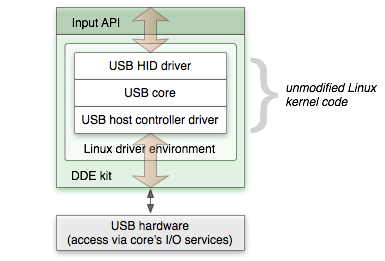
This release introduces the first fragments of USB support to Genode, taking the USB human-interface device (HID) class as starting point. With this work, we follow our approach of reusing unmodified Linux device drivers executed within a device-driver environment called DDE Linux. In the previous release, we already utilized this approach for realizing basic networking on Genode. With this release, we complement DDE Linux with support required by USB drivers. We are grateful for being able to base our implementation on the excellent foundation laid by Dirk Vogt. He described his work in USB for the L4 environment.
For USB HID support, we added the Linux USB and input subsystems to the DDE Linux 2.6 framework. Besides the dde_linux26/net.h API for network drivers added in Genode 9.02, the current version also includes APIs for input (dde_linux26/input.h) and USB (dde_linux26/usb.h). We intend these interfaces to mature towards generic driver-library APIs in the future. For example, BSD-based drivers shall transparently provide the same functionality as the current Linux drivers, which permits the simple reuse of driver server implementations.
|
Image 1 illustrates the current implementation of the USB-based human-interface device (HID) driver. In this monolithic setup, all parts of the USB stack and the device API are executed within one address space. These parts are
-
Input server glue code
-
HID driver and input subsystem
-
Core functions for management of USB request buffers (URBs), attached devices, and registered drivers
-
Host controller drivers for UHCI, OHCI, and EHCI
|
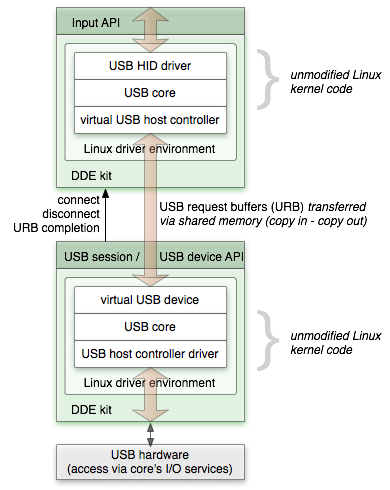
We regard this as an intermediate step towards our goal to decompose the USB stack. Image 2 shows our aspired design. In this design, the USB server and one or more USB gadget drivers run in dedicated address spaces. The USB server provides two interfaces called USB session interface and USB device interface. A USB session interface corresponds to a virtual root hub, from which USB devices can be queried. The client of the USB session interface is usually an USB gadget driver that uses the USB device interface. Because this interface is used for transferring the actual payload at a potentially high bandwidth, it is based on shared memory and signals. The USB server consists of the following components:
-
USB server glue code
-
Virtual USB device driver managing all attached devices
-
Core functions including hardware hub management
-
Host controller drivers
The USB server presents a virtual USB hub to each USB gadget driver. Such a driver consists of:
-
Device interface, e.g., input server glue code
-
Gadget driver, e.g., HID driver and input subsystem
-
Core functions
-
Virtual host controller
-
USB client glue code
The HID driver uses the USB session API to monitor ports of its virtual root hub and submit URBs to attached devices. The session interface facilitates the signalling framework for event notification and a shared-memory dataspace for URB transmission.
The os repository already contains the USB session and USB device interfaces. However, the decomposition is not yet in a functional state.
- Current limitations
The current monolithic implementation of the USB HID service can already be used as a replacement of the PS/2 driver. However, both drivers cannot be used at the same time, yet. To enable the use of both USB HID and PS/2, we plan to create a further component that merges multiple streams of input events and passes the result to the GUI server.
OKLinux on Genode
According to our road map, we pursued the goal to run Linux as a node in Genode's process tree. We explored two approaches:
- Reanimating the Afterburner project conducted by the L4Ka group
-
This approach is the result of the L4Ka groups's long-year experience with manually supporting L4Linux on top of the L4ka::Pistachio kernel. Because of the high costs of maintaining the paravirtualized Linux kernel, a semiautomatic paravirtualization technique was created. According to the impressive results presented in Pre-Virtualization: Soft Layering for Virtual Machines, this approach is able to drastically reduce maintenance costs while retaining good performance. Furthermore, the approach was applied not only to Linux running on the L4 kernel but also for using Xen or Linux as underlying host operating systems.
- Porting the OKL4-specific version of L4Linux to Genode
-
Open Kernel Labs maintain a custom version of L4Linux that runs on OKL4. This version is mostly referred to as OKLinux aka Wombat. Since Genode can now use OKL4 as base platform, the reuse of OKLinux in combination with Genode has become a feasible option.
Both approaches have pros and cons. Whereas Afterburner is a intriguing approach, this project seems to be stalled. It relies on a rather old tool chain, and recent Linux features such as thread-local storage support are not considered, yet. To pick up this solution for Genode will require us to fully understand the mechanisms and the code. So we consider this as a mid-term solution. In short term, running OKLinux on Genode is more feasible. We were already able to create a prototype version of OKLinux running on Genode. This version starts up the kernel including all Linux kernel threads, mounts the boot partition supplied as memory image, and starts the init process. The engineering costs had been rather low. We replaced the Iguana user land libraries as originally used by Wombat by a Genode-specific reimplementation to keep our manual adaptions of the Linux kernel code as small as possible. Our custom reimplementation of the needed Iguana APIs consists of less than 1,000 lines of code (SLOC). The diff for our changes to the OKLinux kernel code comprises less than 1,000 lines. We plan to make a snapshot of this prototype publicly available soon.
Operating-system services and libraries
Nitpicker GUI server
We optimized the performance of the refresh call, which updates all views of a session, which display a given buffer portion. The new implementation restricts the redraw operations to the fragment of each view that displays the specified buffer portion. The performance improvement becomes most visible when updating only small parts of a buffer.
USB session interface
Genode's emerging USB support introduces two new interfaces to the os repository, which are called USB session and USB device.
An USB_session is a virtual USB bus with just one root hub with MAX_PORTS downstream ports. The client of such as session submits USB request blocks (URBs) and is, in turn, informed about port changes on the root hub as well as request completion. Connected USB devices can be referenced by USB device capabilities and are associated with one port at the virtual root hub on server side.
An USB_device references a hardware device connected to a virtual USB bus's root hub. The device capability enables the client to send USB request blocks to the hardware device.
Input interface
We updated the key codes of the input interface in response to recent changes of Linux' dev/event definitions.
VESA driver
Until now, there existed different processes that tried to access the PCI bus via I/O ports, in particular the VESA framebuffer driver and the PCI bus driver.
Since core enforces that each I/O port can only be assigned exclusively to one component in the system, multiple processes that need access to the same I/O ports cannot run at the same time. For our default demonstration scenario, we had been able to allow the VESA driver to use the PCI I/O ports because nobody else needed them. However, our growing base of device drivers relies on the PCI bus driver. To be able to use the VESA driver together with other drivers, we virtualized the access to the PCI bus from within the VESA driver.
Our current PCI virtualization code is pretty limited. The VESA driver sees a virtual PCI bus with only the VGA card attached. For now, we only allow reading the PCI configuration space of this device, but not writing to it. Apparently, this simple approach is sufficient to run the VESA BIOS of Qemu. However, other VESA BIOS implementations may need further access to the PCI device's configuration space. For example, for querying the size of a PCI resource, write access to base address registers is required. In such an event, the VESA driver will print a message about the missing virtualization feature:
writing data register not supported
If you see such a message, we are very interested to see your log output such that we can enhance our PCI virtualization code as needed. Please contact us!
Base framework
In the process of bringing Genode to the OKL4 kernel, we have generalized much of former platform-specific code:
-
The initialization of C++ exception handling has now become part of the generic cxx library in the base repository. All platforms except Linux are using this generic library now.
-
The server library used to contain a platform-specific part that implemented the manage function of a Server_entrypoint. The generalized version of this library is now being used on all platforms other than Linux.
-
We unified core-internal interfaces and their implementations such as Dataspace_component, Cap_session_component, Rm_session_component, and Irq_session_component. The result has become part of the base repository.
-
On OKL4, threads need to execute small startup code for querying their own thread IDs. Therefore, we have extended the Thread_base interface with a platform-specific hook function called _thread_bootstrap.
-
The types defined in base/native_types.h had been complemented by a new Native_thread_id type. This type is exclusively used by core and the framework libraries. For using the Genode API, this type is meaningless.
-
For the 64bit support, we slightly refined the interfaces of some utility template functions in util/misc_math.h. Furthermore, parts of the generic marshalling code of the IPC framework needed refinement, but no API changes were needed.
Linux-specific changes
Adaptation to 64 bit
Because most Genode developers tend to work with the Linux version of Genode, supporting 64-bit Linux becomes increasingly important. With the current release, we start to officially support 64-bit Linux as base platform. This comes along with the following changes:
-
We replaced the spec-x86.mk file with new spec-x86_32.mk and spec-x86_64.mk files. The default version of base-linux/etc/specs.conf automatically chooses the right spec file according to the output of uname -m. Therefore, output of the build processes matches your host architecture. This behaviour can be changed by placing a customized spec.conf file in your build directory's etc/ subdirectory.
-
We added type definitions for 64-bit-specific fixed-size integers in the form of a 64-bit-specific fixed_stdint.h file.
-
Because using 64 bit instead of 32 bit changes the payload size of RPC messages, we had to adjust several message buffers such as Ram_session_client and Input::Session_client, and adapted the used stack sizes.
-
Towards the goal of completely dissolving Genode's dependency on the Linux' glibc, we implemented custom system-call bindings. Apparently, Linux' syscall interface differs between 32 bit and 64 bit. For example, the 32-bit version handles all socket-related calls via a compound socketcall whereas the 64-bit version uses distinct syscalls. Another difference is the handling of the mmap syscall and different behaviour of tkill. The latter problem was resolved by replacing tkill with tgkill and setting the thread-group argument of the corresponding PID. Therefore, a Native_thread_id on Linux now comprises both the TID and the PID.
-
The Platform_env on Linux contains a local implementation of the Rm_session interface, which uses mmap to attach dataspaces to the process' address space and maintains the region list in the form of a static array. This array was dimensioned to 256 entries, which constrained the maximum amount of usable memory when allocating a lot of small blocks via Genode's heap. Since the heap allocates backing store at the granularity of only 16KB, the worst case for reaching this limit was about 4MB. This was OK for our simple test applications. But for using Qt4, in particular on 64 bit, this has become a serious limitation. For now, we increased the region limit to 4096 and plan to replace the static array with a dynamically growing data structure. Furthermore, we made the heap granularity depend on the actual machine-word size. Therefore, the heap allocates its backing store in 32KB blocks when running on 64 bit.
Debugging hooks
On Linux, we use gdb for debugging Genode. This is feasible as long as the targeted process is running. However, during low-level debugging, we had the recurring problem of a thread dying shortly after starting up. So we added a hook for halting a thread at the startup in order to be able to attach gdb to the thread before it dies. This simple hook lets the thread wait for a key press by directly calling the read syscall. We also added a simple debug facility for printing debug messages bypassing Genode's LOG service by calling the write syscall directly. Both hooks are now part of the Linux version of the env library (see base-linux/src/base/env/debug.cc). Note that these hooks are not part of the Genode API. There exists no header file.