
Release notes for the Genode OS Framework 22.02
The 22.02 release is dominated by three topics, the tightening and restructuring of the code base, device-driver infrastructure, and the transition of Sculpt OS towards a versatile toolkit for building specialized operating-system appliances.
Regarding the house-keeping of the code base, the release introduces a clean split between hardware-specific parts and the generic framework foundation. In particular, the various supported SoCs are now covered by distinct Git repositories shepherded by different maintainers, which improves the clarity of the code base and eases the addition of SoC support by 3rd parties. The framework foundation underwent a major spring cleanup including the tightening of several APIs and a raised default warning level. The changes are covered by Section Base framework and OS-level infrastructure.
The reorganization of the code base went hand-in-hand with intensive device driver work for several platforms (Section Device drivers). In particular, we started to apply our new method of porting Linux driver code to PC drivers such as our new USB host controller driver. The Intel GPU driver received welcome performance optimizations and became usable for guest operating systems running in VirtualBox 6. On the PinePhone, Genode has started interacting with the modem.
From a functional perspective, the highlight of the release is the extension of Sculpt OS towards a highly customizable toolkit for building special-purpose operating systems defined at integration time (Section Framework for special-purpose Sculpt-based operating systems). This new level of flexibility cleared the path to running a bare-bones version of Sculpt OS on the PinePhone, or directly on a Linux kernel.
Framework for special-purpose Sculpt-based operating systems
Sculpt OS is Genode's flagship system scenario. Designed as general-purpose OS, it combines the framework with a custom administrative user interface, package management, and drivers for commodity PC hardware. It has ultimately enabled technical-minded users to use Genode as day-to-day OS. The appeal of Sculpt's architecture does not stop here though.
As hinted by its name, the fundamental idea behind Sculpt OS is the interactive "sculpting" of the operating system to fit the individual user's needs. The starting point is a small generic system image, from which the user can grow a highly customized system. The original vision puts emphasis on interactivity, which is embodied by its interactive component graph. Over time, however, we recognized the potential of making the bare-bones Sculpt system image customizable as well, effectively turning Sculpt into a framework for building highly specialized - in addition to general-purpose - operating systems.
Modularized Sculpt OS image creation
The current release replaces the formerly fixed feature set of the Sculpt system image - defined by the sculpt.run script - by configuration fragments that can be easily mixed, matched, and extended. All customizable aspects of the Sculpt image can now be found at a new location - the sculpt/ directory - which can exist in any repository. The directory at repos/gems/sculpt/ serves as reference and contains all fragments of the regular Sculpt OS. For detailed explanation of mechanisms and terms (e.g., launcher) used below please refer to the Sculpt documentation.
The sculpt directory can host any number of <name>-<board>.sculpt files, each specifying the ingredients to be incorporated into the Sculpt system image. The <name> can be specified to the sculpt.run script. E.g., the following command refers to the default-pc.sculpt file:
build/x86_64$ make run/sculpt KERNEL=nova BOARD=pc SCULPT=default
If no SCULPT argument is supplied, the value default is used. Combined, the BOARD and SCULPT arguments refer to a .sculpt file. E.g., the default-pc.sculpt file for the regular Sculpt OS looks as follows:
# configuration decisions drivers: pc system: pc gpu_drv: intel # supplemental depot content added to the system image import: pkg/drivers_managed-pc pkg/wifi src/ipxe_nic_drv # selection of launcher-menu entries launcher: vm_fs shared_fs usb_devices_rom # selection of accepted depot-package providers depot: genodelabs cnuke alex-ab mstein nfeske cproc chelmuth jschlatow depot: ssumpf skalk
It refers to a selection of files found at various subdirectories named after their respective purpose. In particular, there exists one subdirectory for each file in Sculpt's config file system, like nitpicker, drivers... The
.sculpt file selects the alternative to use by a simple tag-value notation.
drivers: pc
The supported tags are as follows.
Optional selection of /config files. If not specified, those files are omitted, which prompts Sculpt to manage those configurations automatically or via the administrative user interface:
| Tag | Purpose |
|---|---|
| fonts | font configuration |
| nic_router | virtual network routing |
| event_filter | user-input parametrization |
| wifi | wireless network configuration |
| runtime | static runtime subsystem structure |
| gpu_drv | GPU driver configuration |
Selection of mandatory /config files. If not specified, the respective default alternative will be used.
| Tag | Purpose |
|---|---|
| nitpicker | GUI-server configuration |
| deploy | packages to deploy |
| fb_drv | framebuffer-driver configuration |
| clipboard | global clipboard rules |
| drivers | drivers subsystem structure |
| numlock_remap | numlock-handling rules |
| leitzentrale | management subsystem structure |
| usb | USB-device policy |
| system | system state |
| ram_fs | RAM file-system configuration |
Note that almost no part of the Sculpt image is sacred. One can even replace structural aspects like the administrative user interface or the drivers subsystem.
Furthermore, the .sculpt file supports the optional selection of supplemental content such as a set of launchers.
launcher: nano3d system_shell
Another type of content are the set of blessed pubkey/download files used for installing and verifying software on target. This information is now located at the sculpt/depot/ subdirectory. As a welcome collateral effect of this change, depot keys can now be hosted in supplemental repositories independent from Genode's main repository.
Including component packages in the Sculpt image
Sculpt OS normally relies on network connectivity for installing and deploying components. With the new version, it has become possible to supply a depot with the system image. The depot content is assembled according to the pkg attributes found in launcher files and the selected deploy config. The resulting depot is incorporated into the system image as depot.tar archive. It can be supplied to the Sculpt system by mounting it into the RAM file-system as done by the ram_fs/depot configuration for the RAM fs.
Supplementing custom binaries directly to the Sculpt image
It is possible to add additional boot modules to the system image. There are two options.
build: <list of targets>
This tag instructs the sculpt.run script to build the specified targets directly using the Genode build system and add the created artifacts into the system image as boot modules. It thereby offers a convenient way for globally overriding any Sculpt component with a customized version freshly built by the Genode build system.
import: <list of depot src or pkg archives>
This tag prompts the sculpt.run script to supply the specified depot-archive content as boot modules to the system image. This change eliminates the need for former board-specific pkg/sculpt-<board> archives. The board-specific specializations can now be placed directly into the respective .sculpt files by using import:.
Optional logging to core's LOG service
To make the use of Sculpt as test bed during development more convenient, the log output of the drivers, leitzentrale, and runtime subsystems can be redirected to core using the optional LOG=core argument on the command line.
build/x86_64$ make run/sculpt KERNEL=nova BOARD=pc SCULPT=default LOG=core
Sculpt OS meets the PinePhone
Thanks to the greatly modularized new version of Sculpt OS, we have become able to run a minimalistic version of Sculpt on the PinePhone, as demonstrated in our recent presentation at FOSDEM.
- Genode meets the PinePhone
-
https://fosdem.org/2022/schedule/event/nfeske/
Microkernel developer room at FOSDEM, 2022-02-05
Despite lacking drivers for storage and network connectivity, we are already able to put together interesting interactive system images for the PinePhone. To make this possible, a few additional steps had to be taken though.
First, we had to make Sculpt's administrative GUI able to respond to touch events. It formerly assumed that click/clack events are always preceded by hover reports that identify the clicked-on widgets. For touch events, however, the most up-to-date hover information referred to the previous "click" because there is no motion without touching. So the GUI tended to identify the wrong widgets as click targets. We solved the tracking of the freshness of hover information by interspersing sequence numbers into the event stream and reflecting those numbers in hover reports.
Second, to allow textual input, we added a custom touch-screen keyboard specifically for bare-bones Sculpt scenarios where low complexity and small footprint are desired.
Test-driving Sculpt OS on the Linux kernel
As another showcase of the flexibility gained by the modularization of Sculpt, a bare bones Sculpt system can now be hosted directly on the Linux kernel as simple as:
build/x86_64$ make run/sculpt KERNEL=linux BOARD=linux
Granted, this version is not generally useful, but it serves as a welcome accelerator of the development workflow and a convenient debugging aid. Since each component is a plain Linux process, it can be easily inspected via GDB. The turn-around time of placing an instrumentation in any component of Sculpt OS has been reduced from booting a machine to the almost instant restart of Sculpt under Linux.
Modularized source-code organization
With the previous release, new decentralized repositories got introduced to simplify the maintenance and for improved clarity of what is needed to drive a single board or SoC. We started with repositories for the Allwinner A64 SoC, the Xilinx Zynq, and NXP i.MX-family of SoCs, as well as the RISC-V Qemu and MiG-V support. Initially those repositories were located at the storage of the developer in charge. Now, we've moved them centrally under the umbrella of the Genode Labs account at https://github.com/genodelabs. Thereby, they become easy to find, and the responsibility of Genode Labs for the repositories becomes intuitively clear.
Raspberry Pi
Moreover, a further dedicated repository got established to combine all ingredients to drive Raspberry Pi boards. It is located at https://codeberg.org/genodelabs/genode-rpi. Currently, it contains board support for Raspberry Pi 1 and 3 including platform, framebuffer, and SD-card drivers.
When creating a new build-directory for ARMv6 or ARMv8, you'll have to uncomment the following line within the etc/build.conf file:
#REPOSITORIES += $(GENODE_DIR)/repos/rpi
Of course, you have to clone the genode-rpi repository to repos/rpi of your Genode main repository in addition.
PC drivers
To foster consistence with the ARM and RISC-V universe, the x86-based PC got its own repository too. As this is the de-facto board most Genode developers work with, it is however already part of Genode's main repository under the path repos/pc/, and does not need to be cloned from a separate Git repository.
However, if you use a pre-existing build-directory after updating to this release, you have to add the corresponding path to the REPOSITORIES variable, before building for x86_32 or x86_64.
Currently, the new repository contains the latest version of the USB host driver for PCs. Other drivers will follow in the upcoming releases.
Base framework and OS-level infrastructure
Preventing implicit C++ type conversions by default
Since version 18.02, Genode components are built with strict warnings (the combination of -Werror with -Weffc++, -Wall, and -Wextra) enabled by default. Later, in version 19.02, we added -Wsuggest-override to the list, eliminating another class of uncertainties from the code base. With the current release, we further tighten our warning regime by enabling -Wconversion by default. The rationale behind this change and the practical ramifications are explained in the following dedicated article:
- Let's make -Wconversion our new friend!
In cases where an adaptation is unfeasible - in particular when warnings originate from 3rd-party libraries - the implicit type conversions can be selectively permitted by adding the following line to the corresponding build description file:
CC_CXX_WARN_STRICT_CONVERSION :=
API changes
Tracing
We removed the old Trace::Session::subject_info RPC interface, which got superseded by the shared-memory-based for_each_trace_subject interface in version 20.05.
Revised packet-stream utilities
When Genode's packet-stream API for asynchronous bulk transfers between components was originally introduced, components were predominately designed as programs using blocking I/O. This practice has been largely replaced later by the current notion of modelling components as state machines that handle I/O in an asynchronous fashion. The blocking semantics of the packet-stream mechanism are a relic from the early days of Genode.
With the current release, we took the opportunity for simplification and removed the implicit blocking semantics from the packet stream. This way, we gain two benefits.
First, the removal of blocking semantics - which in fact still rely on a deprecated interface - clears the way to general performance optimizations of Genode's signal-handling mechanism.
Second, the resulting components become more deterministic. In modern components, I/O operations are not expected to block if implemented correctly. Since the packet stream happened to block implicitly, however, implementation bugs (like calling get_packet without checking for packet_avail before) may remain hidden. The removal of blocking semantics uncovers such deficiencies.
Given this motivation, we replaced the implicit blocking semantics with an error message and the raising of an exception, both triggered on the attempt to invoke a formerly blocking operation. Note that this may deliberately break components that still (unknowingly) rely on the blocking semantics. A possible short-term fix for those components would be to add an explicit wait_and_dispatch_one_io_signal loop before calling a (potentially) blocking function. But ultimately, such code would be subject for redesign.
The possible exceptions are as follows:
- Packet_stream_source::Saturated_submit_queue
-
Attempt to add a packet into a completely full submit queue.
- Packet_stream_source::Empty_ack_queue
-
Attempt to retrieve packet from empty acknowledgement queue.
- Packet_stream_sink::Empty_submit_queue
-
Attempt to take a packet from an empty submit queue.
- Packet_stream_sink::Saturated_ack_queue
-
Attempt to add a packet to a filled-up acknowledgement queue.
The adaptation of Genode's components to this change concerned mostly users of the block-session and file-system session interfaces. The other prominent users of the packet stream - the NIC and uplink sessions - were already operating wholly asynchronously.
File-system session
As mentioned above, the file-system session interface is based on the packet-stream mechanism. This mechanism uses independent data-flow signals for the submit queue and the acknowledgement queue. In practice, the file-system session does not benefit from the distinction of both cases. In contrary, for common sequential request-response patterns, the amount of data-flow signals could potentially be reduced if the distinction wasn't there. To enable this optimization down the road, we consolidated the file-system session's data-flow signals into one handler at the server and one handler at the client side.
This change alongside the removal of blocking semantics from the underlying packet-stream mechanism, prompted us to revisit several file-system-related components, in particular changing them to use Genode's flexible VFS infrastructure instead of plumbing with the file-system session directly. Notable components are the usb_report_filter and rom_to_file. System scenarios using these components need to be updated by adding a VFS configuration as follows to the respective component.
<config> <vfs> <fs/> </vfs> </config>
NIC-packet allocation tweaks
The allocator for NIC packets (os/include/nic/packet_allocator.h) was improved in a way that the IP header of an Ethernet frame is now aligned to four bytes. This change was motivated by the fact that the "load four bytes" instruction on RISC-V will fail if the access is not four-byte aligned, but since the compiler does not know about the alignment of dynamic memory, it may generate a four-byte load on a two-byte-aligned address when processing IPv4 addresses in the IP header.
Note, the alignment tweak reduces the maximum usable packet size allocated from the Nic::Packet_allocator to OFFSET_PACKET_SIZE, which is effectively 2 bytes smaller than the former DEFAULT_PACKET_SIZE.
Input events
We changed the type of Input::Touch_id from int to unsigned because there is no sensible meaning for negative touch IDs.
A new Input::Event::Seq_number type allows for the propagation of sequence numbers as a means to validate the freshness of input handling. E.g., a menu-view-based application can augment artificial sequence numbers to the stream of motion events supplied to menu_view. Menu view, in turn, can now report the latest received sequence number in its hover reports, thereby enabling the application to robustly correlate hover results with click positions.
Cosmetic changes
To foster consistent spelling throughout the code base, Dataspace::writable got renamed to Dataspace::writeable.
Removed interfaces
We removed gems/magic_ring_buffer.h. Since its introduction four years ago, the utility remained largely unused.
The Env::reinit and Env::reinit_main_thread could be removed now, with the transition away from the Noux runtime - the only user of those mechanisms - completed.
The file-system read/write helpers of file_system/util.h are from a time before the VFS API at os/vfs.h was available. As they relied on the (now removed) blocking semantics of the packet-stream interface, the helpers have been removed.
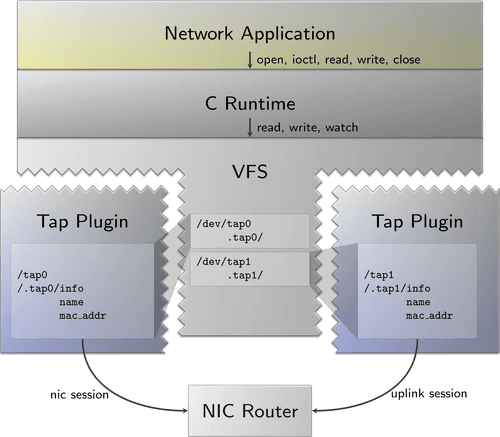
VFS plugin for network-packet access
In some situations, applications need raw access to a network device without a standard TCP/IP-stack in between. In the Genode realm, this is provided by the NIC and Uplink session interfaces. This release adds a VFS plugin to also establish a convenient interface to these sessions for POSIX applications. The plugin adheres to FreeBSD's tap interface and follows along our streamlined ioctl handling.
The plugin is instantiated by adding a <tap ...> node to a component's VFS. By default, the plugin opens a NIC session that is typically routed to the NIC router. In this case, the MAC address is assigned by the NIC router. Furthermore, we can optionally add a label attribute to specify the session label by which the NIC router is able to distinguish multiple session requests from the same component.
<config>
<vfs>
<dir name="dev">
<tap name="tap0" label="local" />
</dir>
</vfs>
</config>
With this in place, we are able to write a simple client application:
#include <net/if.h>
#include <net/if_tap.h>
#include <sys/ioctl.h>
int main(int, char**)
{
int fd = open("/dev/tap0", O_RDWR);
if (fd == -1) {
printf("Error: open(/dev/tap0) failed\n");
return 1;
}
/* get mac address */
char mac[6];
memset(mac, 0, sizeof(mac));
if (ioctl(fd, SIOCGIFADDR, (void *)mac) < 0) {
printf("Error: SIOCGIFADDR failed\n");
return 1;
}
/* read()/write() */
/* [...] */
close(fd);
}
As you can see, the usage is as easy as opening /dev/tap0 and performing read/write operations on the acquired file descriptor. Moreover, we are able to use the SIOCGIFADDR I/O control operation to get the device's MAC address.
Beyond that, we are able to instruct the plugin to open an uplink session instead, e.g., to develop a device driver. In this case, the MAC address must be set by the client, which is either done by specifying a mac attribute as shown below or by using the SIOCSIFADDR I/O control operation.
<config>
<vfs>
<dir name="dev">
<!-- NIC session (default) -->
<tap name="tap0" label="local" />
<!-- Uplink session -->
<tap name="tap1" label="uplink"
mode="uplink_client"
mac="11:22:33:44:55:66" />
</dir>
</vfs>
</config>
Under the hood, the plugin not only provides the device file /dev/tap0 but also a companion file system under /dev/.tap0/ for ioctl support. Currently, the plugin provides a read-only pseudo file "name" containing the device name and a "mac_addr" file containing the MAC address. The C runtime transparently translates the SIOCGIFADDR, SIOCSIFADDR and TAPGIFNAME I/O control requests into read/write operations to /dev/.tap0/*.
|
Note, that the FreeBSD interface differs from Linux' tap interface. On Linux, tap devices are created by opening /dev/net/tun followed by a TUNSETIFF ioctl (providing the device name and mode). After that, the particular file descriptor can be used for reading/writing. When multiple devices are used, the process is done several times. If only a single tap device is needed, it is still possible to use the VFS plugin for /dev/net/tun and just ignore the ioctl by creating an emulation header file linux/if_tun.h with the following content:
#include <net/if_tap.h> #define TUNSETIFF TAPGIFNAME #define IFF_TAP 0 #define IFF_NO_PI 0
The plugin's implementation is located at repos/os/src/lib/vfs/tap/.
Black-hole server component
Sometimes you may want to run a certain Genode component, component sub-system, or package, but you're not interested in part of its interaction with the rest of the system. For instance, imagine having an info screen in the public that plays videos but without any sound. In this scenario you would need to instantiate a video player but such a component is likely to request also an audio-out session by default. If you don't serve this requirement, the player won't start its work but serving the requirement means integrating an audio stack (with a driver back-end), thereby adding superficial complexity for something that isn't used anyway. Furthermore, your target platform may even prevent serving certain session requests correctly (e.g., if there is no audio hardware in the example above).
This is where the black-hole server-component comes in. It's a dummy back-end for the most common Genode services. Its goal is to make clients of a service think they are dealing with a real back-end but without the service-typical side effects to hardware or other components. For instance, the video player mentioned above can open its audio channel, send all of its audio data, and will receive acknowledgements. However, from there on, the audio data doesn't go anywhere - the black-hole server just drops it as soon as possible.
So far, the black-hole server supports the services audio-out, audio-in, capture, event, NIC, and uplink. The server may provide them all together or only an individual subset depending on its configuration. Each service that shall be provided must be added as sub-tag to the component's configuration:
<config> <audio_in/> <audio_out/> <capture/> <event/> <nic/> <uplink/> </config>
The implementation of the black-hole server can be found at repos/os/src/server/black_hole. As a usage example, have a look at the corresponding test package repos/os/recipes/pkg/test-black_hole that can be run like this:
make run/depot_autopilot TEST_PKGS=test-black_hole \
TEST_SRCS= \
KERNEL=nova BOARD=pc
If you want to deploy the server in your Sculpt OS, you may use the package repos/os/recipes/pkg/black_hole.
Moved or removed components
Our rework of the low-level framework interfaces - the platform session and file-system session in particular - led us to revisit all components affected by those changes. Whereas most components were updated, the following components have been removed:
-
An ancient (unused) version of the readline library. The bash shell carries its own version.
-
ROM prefetcher that was originally used for reducing seek times of CD-ROMs.
-
Outdated block components such as http_block (lacking SSL support), block_cache (unused), test/block scenarios (superseded by block_tester and vfs_block).
-
Old OMAP4 and Exynos5 platforms no longer covered by any automated tests.
-
Old fs_log server substitutable by the combination of terminal_log and file_terminal.
The following components were moved from the main Genode repository to the Genode World repository as they receive only casual maintenance and testing by Genode Labs.
-
Seoul VMM emulating a 32-bit PC.
-
ISO9660 ROM server used only by the testbed of the Seoul VMM.
-
An old port of Lua.
Device drivers
Platform driver
The platform API for ARM introduced in Genode release 20.05 has become the common platform API for all architectures. The original x86-only API variant is now deprecated. The APIs specific to i.MX53 and the Raspberry Pi got removed.
The platform drivers for i.MX53 and Raspberry Pi got re-written to use the modern, generic Platform API. All drivers that used the old API were adapted accordingly. Special thanks go to Tomasz Gajewski, who worked very keen in his spare-time to re-write the platform driver for Raspberry Pi, adapt its framebuffer driver, and most notably tested repeatedly on all kinds of Raspberry-Pi hardware during the development cycle.
DMA buffer utility
Analogously to the Platform::Device utility introduced in release 21.05, a new helper class Platform::Dma_buffer is available now. It simplifies the lifetime management of DMA-capable RAM dataspaces, which now need to be obtained via a privileged component like the platform driver - see Restricting physical memory information to device drivers only section for further references.
The new utility is best described by the following short snippet:
#include <platform_session/dma_buffer.h>
...
void some_function(Env & env)
{
Platform::Connection platform(env);
Platform::Dma_buffer buffer(platform, 4096, CACHED);
log("DMA buffer is located virtually at ", buffer.local_addr<void>());
log("For DMA transfers you have to use the bus address ", buffer.dma_addr());
log("The DMA buffer has the size of ", buffer.size());
...
}
The example shows how to obtain a cached, 4K-sized Dma_buffer, which is used to return its virtual memory address and the corresponding bus-address to program DMA transfers as well as its size.
New Linux-device-driver environment for PC drivers
With the good experiences in mind that we made during the enablement of various peripheral drivers for ARM SoCs using the new DDE Linux approach, it was obvious to apply the new method for the x86 drivers as well. The approach centers around having a vendor kernel for the given platform, with the vanilla Linux kernel (5.14.21) being the de-facto vendor kernel for x86.
The first order of business was separating the architecture-specific parts of the DDE from the generic ones and implementing those back ends for x86. We followed the established pattern and introduced the architecture specific locations where this code resides. While doing so we complemented the DDE with support for PCI as in contrast to ARM this is the prominent transport protocol on x86. Information about the devices is managed via the PCI config space that reflects which resources, like memory-mapped I/O or I/O ports, are available. We therefore added an interface to the DDE to give a driver access to the config space in a mediated fashion - it only may access information strictly necessary for its operation of the device.
As first target we ported the USB host-controller driver and replaced the existing driver with this new one in our testing infrastructure and allowed for more scrutinized testing. During that, a few shortcomings presented themselves. The Genode C-API for USB - used to interface the USB session with the kernel interface - was created in between changes to the USB session back end and did not contain all fixes that were made to the old USB host-controller driver after the C-API was created. We incorporated the missing changes. Additionally, Sculpt expects a certain behavior from the driver where it will report its configuration for the system to react upon. This feature was also missing.
With that work done, the driver is in a good position to be used on a daily basis and to remove any remaining kinks and dents before the Sculpt release.
As a fallback the old USB host-controller driver is still available and got renamed to legacy_pc_usb_host_drv. At the moment the new driver lacks support for UHCI controllers and where necessary the legacy one can be used. Both drivers are interchangeable since the new driver follows the configuration conventions established by the legacy driver. The key difference here is that it is no longer possible to selectively disable or enable support for a specific USB host-controller interface (HCI) driver. The uhci, ohci, ehci, and xhci config attributes are no longer supported.
The following <start> snippet shows the new driver configured for device reporting and BIOS handoff:
<start name="usb_host_drv">
<binary name="pc_usb_host_drv"/>
<resource name="RAM" quantum="10M"/>
<provides> <service name="Usb"/> </provides>
<config bios_handoff="yes">
<report devices="yes"/>
</config>
</start>
GPU-driver improvements
The Intel-GPU multiplexer has greatly matured during the release cycle. With Sculpt OS version 21.10, the GPU multiplexer became an integral part of Sculpt OS and hardware-accelerated 3D support is now available for many Intel GPUs.
Resource accounting
On Genode, a multiplexer should never allocate resources like RAM or capabilities on behalf of a client (e.g., a 3D application). The client should transfer RAM and capabilities from its own quota to the multiplexer instead. Therefore, a 3D application using the Mesa library will transfer RAM and capabilities to the GPU driver upon a GPU session request. If the resources are not sufficient, the GPU driver in turn will reflect this situation back to the application.
Performance optimizations
We improved the allocation strategy of graphics memory and also tried to minimize the number of RPC calls from the 3D application to the GPU multiplexer. Additionally, many operations such as mapping memory to the actual GPU through its page table are performed in a lazy fashion. The lifetime of a Mesa object and the assignment of resources to the GPU - including GPU address space management - is now completely handled by Mesa because Mesa caches resources internally and expects, at least in case of Intel, to have complete control. With these changes in place we were able to increase our glmark2 benchmark by up to 50% for different GPU generations.
OpenGL context support
Contexts are a mandatory feature of OpenGL and Genode's Mesa port lacked support for them up until now. On the GPU level, an OpenGL context requires its own set of GPU page tables, implying a disjunct address space. But OpenGL objects may also be shared between contexts and, therefore, address spaces.
We implemented context support through multiple GPU sessions. Each OpenGL context owns a dedicated GPU session. Graphics memory can now be exported from one GPU session and imported into another, and thus, into another OpenGL context. We expanded Genode's GPU session interface with import and export functions. Whereas a call to export with a given ID will return a capability to the graphics memory belonging to the ID, a call to import of another GPU session takes the exported capability and the designated ID for the buffer in the importing GPU session. Note that only the session that initially allocated the memory can also release it. Upon release, the memory will be revoked for all sessions that imported it.
VFS plugin for GPU
Sometimes Mesa requires synchronization with the GPU multiplexer, for example, when waiting for a rendering call to finish. On GPU session level this behaviour is implemented through Genode signals. Because Mesa applications use pthreads, they cannot wait for Genode signals and synchronization has to be performed in a different manner, e.g., a VFS plugin where synchronous read operations can be performed on a file handle. This behaviour is implemented through the vfs_gpu plugin. It exposes a gpu file that can be opened by Mesa (for the above context support also multiple times). During open, the plugin will create a GPU session for the new file handle and register an internal I/O signal handler. Mesa can in turn call read on the returned fd which will only return in case a signal from the GPU session has been received since the previous call to read.
Each 3D application using Mesa requires a "/dev/gpu" node within its VFS configuration (example):
<config>
<vfs>
<dir name="dev">
<gpu/> <log/>
</dir>
</vfs>
</config>
PinePhone modem access
On our way towards a Genode-based phone, we enabled the low-level access of the Quectel-EG25 modem as found in the PinePhone. This line of work is hosted in the genode-allwinner repository and consists of two parts. First, the modem driver at src/drivers/modem/pinephone/ takes care of the powering and initialization of the modem. It works in tandem with the power and reset controls of the A64 platform driver and the GPIO controls of the PIO driver. The second part is a UART driver interfaced with the control channel of the modem. Once the modem is initialized, this channel allows for the issuing of AT commands as described in Quectel documentation.
A first example scenario is provided by the modem_pinephone.run script. It comprises the modem driver and two instances of the UART driver. One UART driver is connected to the modem's control channel whereas the other is connected to the default serial interface of the PinePhone. By bridging both drivers via a terminal-crosslink component, the scenario allows for the direct interaction with the modem over the PinePhone's serial channel, e.g., unlocking a SIM card or sending SMS messages via the AT+CMGS command.
Restricting physical memory information to device drivers only
To enable user-level device drivers to leverage DMA transactions for the direct transfer of data between devices and memory, Genode's low-level dataspace API offered a way for obtaining the physical address of a given RAM dataspace. With the proliferation of our modern platform driver and with drivers as the only kind of components in need for this information, the current release replaces the traditional Dataspace::phys_addr interface with the new Platform::Session::dma_addr interface, which is restricted to DMA buffers allocated via the specific platform session.
Under the hood, the platform driver gets hold of this information from Genode's core via the new Pd_session::dma_addr function. This interface is only available to the platform driver with the assigned "managing_system" role.
Note that custom user-level device drivers need to be adjusted to this change. Look out for calls of Dataspace::phys_addr. Those dataspaces need to be allocated via Platform::Session::alloc_dma_buffer now. You may consider using the Dma_buffer utility mentioned in Section Platform driver. Also pay attention to the managing_system="yes" attribute that needs to be present in the <start> node of the platform driver.
Libraries and applications
Audio improvements and 3D acceleration for VirtualBox 6
VirtualBox 6 now also supports audio recording via the OSS VFS plugin, which got enhanced accordingly. While testing the audio features with VirtualBox, we noticed that the performance was not ideal, with noticeable interruptions in various situations. We finally could improve the performance by reducing the execution priority of the Vm_connection and by adapting the interval of a watchdog timer in VirtualBox dynamically to ensure that the VirtualBox audio device model is executed in a timely manner.
3D acceleration
VirtualBox 6 introduces the VMSVGA adapter, which emulates the VMWare Workstation graphics adapter with the VMWare SVGA 3D method. The supported OpenGL versions are up to 3.3 (core profile).
With the current release, we have enabled the VMSVGA adapter (Linux) and VBoxSVGA (Windows) on Genode's version of VirtualBox. We achieved this by tying the model's glX interface to the EGL interface of Genode's Mesa library. This way it has become possible to offer hardware-accelerated GPU rendering on Intel GPUs to VirtualBox guest applications. The 3D acceleration can be enabled in the .vbox configuration file like follows.
<!-- 3D Linux --> <Display controller="VMSVGA" VRAMSize="256" accelerate3D="true"/> <!-- 3D Windows --> <Display controller="VBoxSVGA" VRAMSize="128" accelerate3D="true"/>
Because VirtualBox multiplexes 3D applications through OpenGL contexts, context support had to be added to our Mesa back-ends (Section GPU-driver improvements).
Revised Boot2Java scenario
Genode's Boot2Java scenario that demonstrated an OpenJDK based network filter component featuring two NIC interfaces had been custom tailored to the i.MX6 SoloX system on a chip. This rare hardware made testing and reproducing the scenario hard for people outside Genode Labs.
Therefore, we decided to revise Boot2Java by making it executable on Qemu's x86_64 platform. No additional changes to the scenario were made, which implies it still uses two NIC interfaces on Qemu and identical Java byte code.
Additionally, we took advantage of Genode's new modular Sculpt image approach as described in Section Framework for special-purpose Sculpt-based operating systems. This gives the advantage that adjustments to other platforms or setups are easier to achieve.
Because the scenario is executed by Qemu, everyone can test Boot2Java by running:
build/x86_64$ make KERNEL=nova BOARD=pc run/boot2java
Note: The two NIC interfaces are forwarded to host ports 8080 and 8081, which can be inspected with any browser or command line tool by accessing
http://localhost:8080 http://localhost:8081
Platforms
Completed C and stdc++ support for the RISC-V architecture
We greatly enhanced Genode's RISC-V support by enabling the libc, libm, and stdcxx libraries on RISC-V. This implies that many other generic libraries and components can now be built and executed on RISC-V (e.g., TCP/IP stacks, web server, or POSIX applications).
The official Genode board-support repository for RISC-V has been moved to https://codeberg.org/genodelabs/genode-riscv.
Additionally, we added RISC-V to our nightly testing and building infrastructure as well as support for Genode's depot_autopilot, which yields improved test coverage.
Build system and tools
Automated tracking of build artifacts
In Genode run scripts, there is a close relation between the arguments for the build step and the arguments for the build_boot_image step. The former is a list of build targets specified as locations within the source tree. The latter is usually a list of the binaries produced by the build step. However, as build results are not strictly named after their location in the source tree and one build target can even have multiple results, the relation between the arguments of both stages remains rather informal and must be managed manually.
The manual curation of build_boot_image arguments, however, can be error prone. E.g., when adding a build argument, one may miss to also add the corresponding build_boot_image argument. To relieve developers from this burden, we extended the run tool with the new function build_artifacts, which returns a list of artifacts created by the build step. The returned list can be directly supplied as argument to the build_boot_image step.
build_boot_image [build_artifacts]
Note that the list covers only program targets and shared libraries. Other artifacts created as side effects of custom rules are not covered. By default, the target's name is taken as the name of the corresponding build artifact. In special cases, e.g., if one target description file produces more than one binary, it is possible to explicitly define the build artifacts using the BUILD_ARTIFACTS variable.
Streamlined shared-library handling
Up to now, executable binaries created directly in a build directory differed in subtle ways from the ones created as depot archive. In the former case, all transitive shared-library dependencies used to be included in the binary's link dependencies whereas the latter used to include only direct dependencies but no transitive dependencies. We have now adjusted the build system to keep transitive shared-library dependencies private in either case, improving the consistency of binaries created in a regular build directory and binaries created in depot archives.
Note that this change may uncover missing library dependencies in build description files. E.g., whenever a target uses Genode's base API, it needs to explicitly state the dependency from the base library now.
LIBS = base
In the previous version, this dependency used to be implicit whenever linking any other library that depended on the base library.