
Release notes for the Genode OS Framework 14.11
With version 14.11 of the Genode OS framework, we are happy to close one of the last functional gaps that prevented us from using Genode for our day-to-day computing needs, namely wireless networking. With the availability of the Intel wireless stack, Genode becomes suddenly useful on most modern laptops. With the wireless stack being one of the most complex driver stacks ported to the framework ever, the undertaking was extremely challenging. Section Intel wireless stack tells the story of how we managed to transplant the driver stack from Linux to Genode.
The second highlight of the release is the new implementation of a trading scheme for CPU resources. When Genode was originally designed in 2006, we envisioned to trade CPU resources between components similarly to how memory is managed throughout Genode. However, the schedulers of the existing base platforms did not allow us to realize this idea - until now. With the new scheduler of our custom base-hw kernel that is described in Section Trading CPU time between components using the HW kernel, Genode becomes finally able to not just assign priorities to subsystems, as already supported on most kernels of the L4 family, but also to guarantee the provisioning of processing time to subsystems. This way, we can achieve low interrupt latencies for untrusted driver code like huge 3rd-party driver stacks, which would normally require us to assign a high priority (with the risk of starving other subsystems) to the component. It also allows Genode users to partition the CPU time between different subsystems in a straight-forward way.
Further highlights of version 14.11 are a new dynamic linker with a code complexity of less than 20% of the old one, VirtualBox version 4.3.16 with support for regular vbox configuration files, networking for the Raspberry Pi, and new GUI components.
Intel wireless stack
Since the very beginning, it was our primary goal to develop the Genode OS Framework as the basis for a usable general-purpose OS. To achieve this goal, we have to overcome various obstacles, device-driver support for common hardware being one of the most tricky jobs. Over the years, we accumulated driver support for essential devices (PS/2, LAN adapters, USB, ATA/SATA). We even dared to port the madwifi driver to provide proof-of-concept wireless network support for Atheros chipsets. Alas, recent Intel-based notebooks come with wireless chipsets from Intel like the IWL6xxx almost exclusively. Up to now, Genode lacked support for these devices but since we had great success with porting existing drivers from Linux in the past, we approached this issue in classical fashion. We decided to port the iwlwifi driver as well as its wireless stack from Linux to Genode using the DDE-Linux approach. In addition, we also ported the WPA supplicant application to enable Wi-Fi Protected Access (WPA).
In the following, we tell our war story of about six months of struggle, setbacks, and adventures. We start with presenting our initially vague idea of a Genode component that would enable us to access protected wireless networks. The overview is followed by the description of the many steps that were needed to turn our vague idea into a working component. Finally, we give a glimpse on the future of the driver and provide quick instructions for using it.
Component overview
|
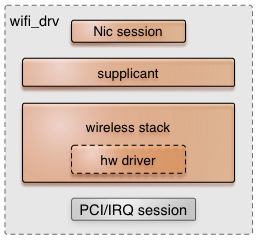
The first figure depicts the wifi_drv component, which consists of four parts. The first part is the iwlwifi driver, which manages the hardware by communicating with the firmware that runs on the wireless card. Second, there is the wireless stack mac80211, which performs all IEEE 802.11 related networking operations including the translation of IEEE 802.11 radio frames to ordinary 802.3 ethernet frames. Furthermore, there is the WPA supplicant, which handles the authentication of a client at the access point. Last but not least, the component has to interface with Genode clients. Therefore, the wifi_drv implements the NIC session interface, which is used by the TCP/IP stack to send and receive ethernet frames.
Since wireless networking itself is a comprehensive field, we decided early on to reuse as much functionality as possible. The following sections will describe the steps taken in more detail.
Driver
In the classical DDE-Linux manner, we started by porting the iwlwifi driver. Porting a Linux driver is a laborious but essentially a straightforward task. All needed source files must be added to the dde_linux repository. These files are normally selected by examining Linux's build configuration for the driver in Makefile and Kconfig file types. The next step is to create a Linux emulation environment for the driver. The central piece of this environment is the lx_emul.h header file. It combines all declarations and data structures, which are scattered over many header files in the original Linux sources, into a single file.
Several times during the creation of the emulation environment, a decision has to be taken whether the original Linux header is used or the declaration is added to the emulation header. Since we have ported Linux code to Genode before, e.g., the USB stack and TCP/IP stack, we developed a sense for which parts of Linux should be taken from the original header files and which parts are better provided by the emulation header. We also learned by experience that it is best to keep the number of used original header files as low as possible. Otherwise future updates become complex and tiresome. The emulation environment is completed iteratively by extending the header file after each compile pass. In the end the linker sends his greetings with a long list of undefined symbols. At this point, we just use a dummy implementation for each undefined symbol like the following:
typedef long DUMMY;
#define DUMMY(retval, name) \
DUMMY name(void) { \
if (SHOW_DUMMY) \
PDBG( #name " called (from %p) not implemented",\
__builtin_return_address(0)); \
return retval; \
}
DUMMY(0, kmalloc)
Most of the symbols the compiler complains about are not needed by our port anyway. These are merely functions the vanilla Linux kernel uses for accounting or rather internal book keeping of resources as well as checking permissions, which are not needed inside our driver component. However, we can use these dummies to trace the function calls when we execute the component. Hence, the decision whether to implement or to ignore the function can be postponed.
The fundamental functionality required by the iwlwifi driver boils down to the usual PCIe resource allocation, IRQ handling, and DMA mapping as well as regular memory allocation. On that account, it is worth mentioning that we use the vanilla skbuff implementation for network-packet buffer management from Linux. Though we have previously implemented this functionality specifically for our USB network driver, we saved us the trouble this time. An sk_buff is allocated by the driver if it receives a packet and is passed to the wireless stack. The stack, in return, submits sk_buffs to the driver to transmit packets.
Nowadays, most work in the Linux kernel is done in workqueues in an asynchronous way by using multiple kernel threads. By contrast, we try to minimize the usage of threads in our driver ports to minimize the emulation effort of the manifold synchronization primitives provided by the Linux kernel API. In fact, we employ cooperative tasks to implement the concurrent execution of code. Although this approach is more complex because preemption points must be defined manually, it is worthwhile since debugging becomes much easier with the absence of actual thread concurrency. In addition, we get away with implementing certain synchronization primitives like mutexes or the whole RCU handling in a much simpler way. As a prominent example of simplification, atomic operations may be implemented as straight assignment statements.
In the original Linux implementation, loading the firmware of the wireless card is an asynchronous operation to mitigate the effect of delays due to file-system operations. On Genode, we access the firmware directly via a ROM connection in the driver server with minimal side effects on other system servers. Therefore, we execute the assigned callback function directly accepting the possible delay at the ROM server.
The iwlwifi driver implements the network-device operations needed by the wireless stack. After the driver loaded the firmware, it initializes the device and registers itself at the wireless stack.
When using cooperative tasks, it is still important to provide the expected behavior and semantics of the original execution environment. The iwlwifi driver handles an IRQ by using the threaded_irq mechanism. Meant as a replacement for the tasklet mechanism, the top-half is executed in the interrupt context whereas the bottom-half is executed in a dedicated kernel thread. For this purpose, our port adds an IRQ task that mimics these semantics. Up to now, we did not add priorities to our cooperative tasks. In the usb_drv component, all tasks have the same priority. Unfortunately, we did not get away that easily in the wifi_drv component and had to employ a scheduler with priorities.
Mac80211 stack
With the iwlwifi driver experiencing its first successful compilation, it was time to port the wireless stack of Linux to Genode. The stack consists of the mac80211 layer that abstracts the device handling and takes charge of converting the 802.11 frames to 802.3 frames. It also handles various management tasks like beacon frames and rate control. The design of the stack is highly asynchronous and event driven. In a nutshell, the stack adds received requests to a workqueue for delayed processing and, hence, remains recipient for further requests at all times. On request completion, the originating component will get notified. Received packets in form of sk_buffs are monitored by the wireless stack and passed to other subsystems by calling netif_receive_skb().
Most requests are issued by the cfg80211 layer, which manages requests from userspace via a netlink-bus based interface called nl80211. For this reason, we added support for AF_NETLINK by adding the corresponding source files to the wifi_drv component. While doing so it became clear that we would need to provide an interface for using netlink from the WPA supplicant. On that account, we created the Socket_call interface.
Configuration
As mentioned before, the configuration of network devices on Linux is done by using the Netlink API nowadays. In the context of wireless networking, it replaces the old ioctl() based Wireless Extension interface with nl80211. Nl80211 enables the user to configure all wireless related properties including association with an access point (AP) and scanning for available networks.
Support for using protected wireless networks on Linux is split between the kernel and the user space. The so-called supplicant that handles authentication against a given access point runs in user space whereas the cryptographic operations on bulk traffic are executed in the kernel. On Linux, the WPA supplicant is used for the user-space work.
The supplicant scans for available networks and tries to authenticate at a known network retrieved from the configuration file. After a suitable network was discovered, the supplicant tries to associate and authenticate at the access point of the network. If this undertaking is successful, the actual IEEE 802.1X authentication takes place. Up to this point, the whole communication with the AP is done unencrypted. While performing the authentication, the WPA supplicant needs access to the raw EAPoL ethernet frames, which is provided by Linux via the AF_PACKET protocol. This protocol is used by the WPA supplicant in its l2_packet back end and, therefore, must be provided by our driver, too. Since we already implemented the Socket_call interface, enabling AF_PACKET was a straight-forward procedure. The driver initializes the af_packet protocol family and switches incoming traffic to its protocol hook in case of EAPoL frames. All other packets are passed to our NIC session front end.
Since the WPA supplicant is normally executed in userspace using the libnl library, it depends on a working libc. The Genode libc is a port of the FreeBSD libc whereas the nl80211 back end of the WPA supplicant expects a Linux-based user land, i.e., glibc. Therefore, we decided to split up the supplicant into separate modules, one for the back end and one for the front end. We created a port of libnl, which uses a specially tailored Linux user emulation environment similar to the emulation of the kernel environment in DDE Linux. The libnl emulation implements various socket related functions like socket, bind, sendto, and recvfrom. These socket functions are mapped to the internal Socket_call interface, which talks to the kernel parts. The nl80211 back end driver is linked against this static libnl library. The WPA supplicant on the other hand is linked against Genode's regular libc. To make sure that each part can only access the symbols that it is supposed to see on linking, we use symbol maps like the following for wpa_driver_nl80211.lib.so.
{
global:
/* array containing all drivers, from drivers.c */
wpa_drivers;
/* ethernet frame handling, from l2_packet_linux.c */
l2_packet_*;
poll;
local:
*;
};
The wpa_drivers array is used by the WPA supplicant to access its internal driver back end and functions. The l2_packet_* functions are used by the EAPoL authentication-handling code. The poll function is required by the supplicant's event handling and therefore mandatory. All file descriptors as well as sockets opened by the back end are processed by the WPA supplicant. All other symbols are kept local to prevent the runtime linker from running into symbol clashes.
NIC session front end
The front end connects the wifi_drv component to Genode clients. When the TCP/IP stack of an application wants to send an ethernet frame, it calls the Nic::Driver::tx() method. The component takes the frame and puts it into a freshly allocated sk_buff. After that, it calls the ndo_start_xmit() function. This function is part of the struct netdev_ops and is implemented by the wireless stack. On packet reception, the wireless stack will pass on the sk_buff by calling netif_receive_skb(). The front end extracts all data it needs from this sk_buff and copies it into the packet stream.
During development of this complex interplay between the NIC session front end and the driver, we also had to cope with Linux-internal semantics of the interface. One prominent example is the handling of head room in the protocol header data in the sk_buff. Shrinking or expanding the head room at the right places is crucial. Otherwise, the driver will produce corrupt packets.
The final picture
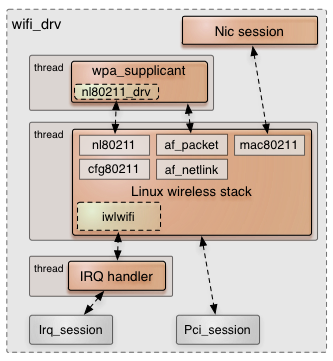
In summary, it can be stated that the wifi_drv turned out to be more complex than we anticipated after our first investigations. The final structure of our port looks like follows.
|
The figure depicts our new component that uses three threads: The first thread executes the WPA supplicant's code, another thread executes the whole Linux kernel code, and the last thread acts as IRQ handler. The Linux thread implements a cooperative task model for concurrent kernel tasks, namely the irq task that runs on the highest priority, the timer task, the work task, the socket_call task, and the linux task.
Roundup
In its current state, the wifi_drv is tested with Intel wireless 6205 and 6300 cards and performs reasonable well for an unoptimized component. Other cards might also work and could be enabled by editing src/lib/wifi/drivers/net/wireless/iwlwifi/pcie/drv.c in the dde_linux/contrib directory manually. The driver does not support changing the network at the moment. This is merely a limitation of the current NIC-session interface, though. The link state is not forwarded to the TCP/IP stack, which therefore will not send a new DHCP request. But, transparent changes among access points within the same LAN without network reconfiguration are possible.
The current version of the wifi_drv is one of the most voluminous drivers ported to date. All in all, it contains about 215,000 lines of 3rd-party code. The code written to connect this code to Genode amounts to about 8,500 lines of code while the lx_emul.h header alone takes 3,245 lines. Porting the whole stack raises the opportunity to enable other wireless drivers in the future with minimal effort. Furthermore, it should be possible to enable more userland tools that use the nl80211 interface, for example, a dedicated wireless-network scanner or even hostapd.
Prior to the wifi_drv component, all ported drivers more or less used the DDE-Kit library to perform low-level tasks, e.g., PCI, IRQ, and memory handling. The original idea behind DDE Kit was to provide a C-based API to ease the porting of drivers, which are mostly written in C whereas Genode is written in C++. During porting the wireless stack, however, we disregarded DDE Kit at all and implemented the needed functionality by using Genode primitives directly. We realized that using a more generic interface like DDE Kit has no advantages because we had to circumvent it more than once in the past. It became more of a burden than a blessing. Also, we recognized that the idea of creating a synergy among various projects utilizing DDE-Linux drivers by providing a common DDE Kit interface did not came to fruition. So we see no benefit in using DDE Kit in future driver ports in the future.
In the future, we plan to address the necessary optimization of the driver component and also want to add a simpler front end to configure the WPA supplicant. For now, we utilize the regular POSIX front end. Furthermore, the user has to specify the network prior to starting the driver. A mechanism, which uses a report session to notify the user about all available networks and that is able to change the configuration of the WPA supplicant on the fly is currently under progress.
Usage
The following instructions may help you to get started because using the driver is somewhat laborious at the moment. For building the driver, you have to add drivers/wifi and drivers/rtc to the build_components list in your run script in addition to the normally required components.
For starting the driver, you may use the following configuration snippet as a starting point:
<start name="wifi_drv">
<resource name="RAM" quantum="32M"/>
<provides><service name="Nic"/></provides>
<config>
<libc stdout="/dev/log" stderr="/dev/log" rtc="/dev/rtc">
<vfs>
<inline name="wpa_supplicant.conf">
network={
ssid="foobar"
key_mgmt=WPA-PSK
psk="foobarfoobar"
}
</inline>
<dir name="dev"> <log/> <rtc/>
<jitterentropy name="random"/>
<jitterentropy name="urandom"/>
</dir>
</vfs>
</libc>
</config>
<route>
<service name="Rtc"> <any-child /> </service>
<any-service> <parent/> <any-child /> </any-service>
</route>
</start
Since we are using wpa_supplicant to handle all network management, we have to configure it. As mentioned before, we use the common POSIX configuration file format for this purpose, and therefore use the same configuration syntax as on any other OS. By convention, our port of the WPA supplicant is looking for the configuration in /wpa_supplicant.conf. It is provided by creating an inline file in the VFS configuration section. We provide a /dev directory populated with all required virtual devices. These devices are needed by various parts of the WPA supplicant.
To run the driver, we need to add the following binaries to the list of boot modules:
rtc_drv vfs_jitterentropy.lib.so libc.lib.so libcrypto.lib.so libssl.lib.so wifi.lib.so wpa_supplicant.lib.so wpa_driver_nl80211.lib.so wifi_drv
Furthermore all Intel wireless cards supported by the iwlwifi driver need a specific firmware to work. You can download the archives containing the firmware from https://wireless.kernel.org/en/users/Drivers/iwlwifi. The firmware image also has to be added to the boot module list. If the firmware is missing, the driver will complain and print an error message:
Could not open file "iwlwifi-6000-6.ucode"
A exemplary run script can be found in repos/dde_linux/run/wifi.run.
Trading CPU time between components using the HW kernel
Up to the last Genode release, CPU scheduling in the HW-kernel was a matter of absolute priority bands, each doing a round-robin schedule over all tasks with the respective priority. While being pretty fast and manageable, this scheme also had its disadvantages: First, there was no way to prevent high-prioritized tasks from starving less important ones. Second, CPU time could not be granted to tasks and passed between them by the means of quota. To cope with these problems without much loss of performance, we decided to come up with a new scheduler whose design was developed with the new feature set in mind right from the start.
The new scheduler introduces the distinction between high-throughput-oriented scheduling contexts - which we shortly call "fills" - and low-latency-oriented scheduling contexts - called "claims". Examples for a typical fill would be the processing of a GCC job or the rendering computations of a sophisticated graphics program. They shall obtain as much CPU time as the system can spare but there is no demand for a high responsiveness. In contrast, a good example for the claim category would be a typical GUI-software stack covering the control flow from user-input drivers through a chain of GUI components to the drivers of the graphical output. Another example is a user-level device driver that has to quickly respond to sporadic interrupts but is otherwise untrusted. The low latency of such components is a key factor for usability and quality of service. Besides introducing the distinction between "claim" and "fill" scheduling contexts, we introduced the notion of a so-called "super period", i.e., in the current version it is one second. The entire super period corresponds to 100% of the CPU time of one CPU. Portions of it can be assigned to scheduling contexts. A CPU quota thereby corresponds to a percentage of the super period.
At the beginning of a super period, each claim has its full amount of assigned CPU quota. The priority defines the absolute scheduling order within the super period among those claims that are active and have quota left. As long as there exist such claims, the scheduler stays in the claim mode and the quota of the scheduled claims decreases. At the end of a super period, the quota of all claims gets refreshed to the initial value. Every time the scheduler can't find an active claim with CPU-quota left, it switches to the fill mode. Fills are scheduled in a simple round-robin fashion with identical time slices. The proceeding of the super period doesn't affect the scheduling order and time-slices of this mode. The concept of quota and priority that is implemented through the claim mode aligns nicely with Genode's way of hierarchical resource management: Through CPU-sessions, each process becomes able to assign portions of its CPU time and subranges of its priority band to its children without knowing the global means of CPU time or priority.
Whereas the management of priorities was already existent at the thread and CPU-session API, the management of CPU quota is new to these components. While extending Genode's resource trading to CPU time, we closely followed the existing patterns of how RAM quota is managed among RAM sessions. In the init configuration, one can configure the assignment of CPU time via "resource" tags that have the attribute "name" set to "CPU" and the attribute "quantum" set to the percentage of CPU quota that init shall assign. The pattern is the same as when donating RAM quota.
<start name="test"> <resource name="CPU" quantum="75"/> </start>
This example configuration would cause init to try donating 75% of its CPU quota to the child "test". Be aware that init and core do not preserve CPU quota for their own requirements by default as it is done with RAM quota. Hence, the configuration should consider such preservations if required. If no preservation is configured, init and core depend on someone not using its quota to the full extend or someone donating its quota temporarily on, e.g., IPC to a core service.
<start name="init2">
<resource name="CPU" quantum="50"/>
...
<config>
...
<start name="test">
<resource name="CPU" quantum="50"/>
</start>
</config>
<start>
This example configuration would result in process "init2" receiving 50% of the CPU quota and process "test" receiving 50% of the CPU quota of "init2". So both processes have 25% of the overall CPU time at disposal.
Once a process owns CPU quota, the process can apply it at the construction of local threads. For this purpose, the thread constructor has been enhanced by an argument that indicates the percentage of the program's CPU quota that shall be assigned. So Thread(33, "test") would cause the backing CPU session to try granting 33% of the component's CPU quota to the new thread "test". Note that the CPU quota of a thread can't be altered after construction for now. A new thread participates in CPU scheduling with a context for only the fill mode if the CPU quota is specified with 0 or not at all to the thread constructor. That doesn't mean that such threads are never scheduled. But they have no guarantee to receive CPU time during a super period and their priority is ignored at all. If a thread gets constructed with a quota greater than 0, it participates in CPU scheduling with a context for both claim and fill mode. The claim context then uses the specified quota and priority as mentioned earlier.
Base framework
New dynamic linker
In 2010, we added dynamic linking support to Genode. This enabled Genode to load and share libraries among programs at runtime. Since, at the time, we did not have a whole lot of experience with dynamic linking and dynamic ELF loading, we decided to port FreeBSD's linker (rtld) to Genode. Up to this point, the old linker has served its purpose well on all supported kernels and hardware architectures.
Nevertheless, we were a little worried because it was hard to understand the linker's internals and we did not want to trust a vital piece of code that we could not comprehend in full. Also, the old linker heavily depended on libc and C-style POSIX semantics, which we had to emulate in order to get the program working.
As one of Genode's midterm goals is making most Genode applications binary compatible for microkernels that support the same hardware architecture and for the reasons above, we decided to implement a Genode specific linker. Our future goal is to keep all kernel-dependent code within the linker (making it kernel dependent) and to link Genode applications against this new version of the linker (thus, making them kernel independent).
Genode's new dynamic linker can be found in repos/base/src/lib/ldso. It is a drop-in replacement for the old linker, which has been removed from Genode's source tree. The linker provides all the functionality the FreeBSD version did: Loading and construction of shared libraries, a shared-object interface (repos/base/include/base/shared_object.h) that is comparable to the DL interface (dlopen, dlsym and friends), link map, and GDB debugging support. The linker is entirely written in C++ and with a code size of about 1800 lines significantly smaller then the old version with about 8000 code lines including the emulation layer.
Low-level OS infrastructure
Graphics helpers for operating on alpha channels
For realizing graphical applications that are security critical, we wish to avoid the complexity of sophisticated tool kits like Qt5. To ease the development of such Genode-specific graphical applications, we introduced a few common low-level interfaces and utilities for graphics in version 14.02.
The current version refines those utilities with added support for layering graphics using alpha channels. There is a new ALPHA8 pixel format that can be used to apply graphics operations on alpha-channels. Furthermore, the new Texture_rgb565 and Texture_rgb888 types provide pixel conversion functions for those common texture formats. This way, ordered dithering is automatically applied when importing pixel data to a RGB565 texture.
Nitpicker GUI server
The fundamental premise of the Nitpicker GUI server is to isolate GUI clients from each other. However, there are situations where the user wants to issue operations spanning multiple clients, for example hiding all views of a subsystem regardless of how many clients are running within the subsystem.
Such operations should be applied to the global view stack to maintain the global view stacking order when hiding and subsequently un-hiding subsystems. To realize this functionality, nitpicker's session interface has been enhanced by a new session_control function. The function takes a session label and an operation as arguments, and performs a control operation on one or multiple sessions. The label is used to select the sessions, on which the operation is applied. Internally, nitpicker creates a selector string by concatenating the caller's session label with the supplied label argument. A session is selected for the operation if its label starts with the selector string. Thereby, the operation is limited to the caller session or any child session of the caller. The supported control operations are the hiding of sessions, the un-hiding of sessions, and the move of session views to the front of the view stack while maintaining their partial order.
To enable the user to unambiguously identify the applications on screen, nitpicker provides an X-ray mode that can be activated by the user at any time. To enable a trusted application such as a panel to respond to the activation of the X-ray mode, nitpicker has gained an option to report the currently active mode to a report session. Furthermore, the user-input handling was slightly refined to accommodate such trusted applications. While X-ray mode is active, nitpicker filters motion events that are not referring to the currently focused domain. However, domains configured as xray="no" (such as a panel) need to obtain motion events regardless of the xray mode. So we relaxed the motion-event filtering to accommodate such clients.
Nitpicker fader
Some graphical applications should not be visible at all times but only when needed, for example an on-screen display that is visible only when the user changes the volume. To realize such applications on top of nitpicker, nitpicker could provide support for toggling the visibility of views. But adding view fading to nitpicker would increase nitpicker's complexity just for the sake of visual presentation. Also, the fading/unfading would be limited to whatever support nitpicker would provide. Alternatively, the fading could be implemented in the respective nitpicker client. But this way, each client that could potentially be used in an on-demand way had to be enhanced with a fading feature. For example, an on-demand visible terminal could be useful in some scenarios. So the terminal had to be enhanced.
Being component-based, Genode provides another alternative: The introduction of a separate component that wraps the nitpicker session interface. The new nit_fader sits in-between nitpicker and a client, and applies alpha-blending to the client's virtual framebuffer. It is entirely optional and requires no changes in nitpicker or any client. Because it can be instantiated per client, it does not compromise the security of nitpicker. Even though it can access the pixel data and the user input designated for a particular client, it cannot leak this information to other clients. Therefore, the implementation complexity of this component is not critical for confidentiality.
|
The current version of nit_fader obtains the alpha-blending value from its configuration. It is able to dynamically respond to configuration changes. If the configured alpha value changes, it performs a smooth transition between the old and the new alpha value.
Growing tool kit for low-complexity GUI applications
With the current release, we continue our line of GUI-related work started in version 14.08. As a side product of implementing low-complexity GUI components directly on Genode instead of using existing GUI tool kits, a library of common utilities is evolving. The utilities are not strictly GUI-related but also cover the construction of multi-process applications.
- gems/animator.h
-
A utility for the smooth interpolation between two integer values. As the interpolation is not linear, it is suitable for fading effects. It is used by the scout widgets, the window decorator, the new nit_fader, and the new menu view.
- gems/chunky_texture.h
-
A texture with its backing store allocated from a RAM session.
- gems/file.h
-
A simple utility for obtaining the content of a file as a buffer.
- gems/local_reporter.h
-
A utility for creating reports to a local report session. It is useful for components that host a local report service, for example the window manager or the new launcher application.
- gems/png_image.h
-
A utility that provides the pixel data of a PNG image as a texture. Its main purpose is hiding the peculiarities of libpng and the life-time management of the involved memory allocations behind a simple interface.
- gems/report_rom_slave.h
-
A utility for instantiating a local report-rom service as a child process. It is used by the window manager and the new launcher application.
- gems/single_session_service.h
-
A utility for providing a locally implemented session as a service to a child process. It is useful for virtualizing services when hosting other components as child processes.
- gems/texture_utils.h
-
Utilities for scaling a texture and for converting textures between different pixel formats.
- gems/wrapped_nitpicker_session.h
-
A default implementation of a wrapped nitpicker session that can be used to selectively override a few functions of nitpicker's session interface while delegating all other functions to the wrapped nitpicker session.
- gems/xml_anchor.h
-
A utility for converting an "anchor" XML attribute to a convenient object.
- cli_monitor/ram.h
-
A utility for managing RAM among a number of child processes.
- cli_monitor/child.h
-
A utility for creating child processes while dynamically managing their RAM resources.
As a note of caution, the API of those utilities should not be expected to be stable. It is likely to change during the further evolution of Genode's GUI architecture.
New menu view application
The new menu view application generates a simple dialog of widgets and reports the hovered element. It is meant to be embedded into applications that require simple GUIs but don't want to deal with the complexities of a full-blown widget set.
The menu view takes a description of the dialog in the form of a ROM session with XML data, for example:
<dialog>
<frame>
<vbox>
<button name="virtualbox">
<label text="VirtualBox"/>
</button>
<button name="toolchain" hovered="yes">
<label text="Tool chain"/>
</button>
<button name="log" hovered="yes" selected="yes">
<label text="Log window"/>
</button>
<button name="config" selected="yes">
<label text="Configuration"/>
</button>
</vbox>
</frame>
</dialog>
Given such a description, it renders a pixel representation of the dialog and provides the result to a nitpicker session. The application dynamically responds to changes of the XML model and thereby applies state transitions of dialog elements. It does not perform any application logic. Even the hovering of dialog elements is out of the scope of the menu view. However, the menu view receives user input for its nitpicker session. It evaluates the user input to determine the currently hovered widget and reports this information to a report session. This way, the parent process of a menu view can implement arbitrary application logic of a GUI application without dealing with any graphical operations.
In the current form, the menu view is limited to fulfill the requirements of the new launcher application. Hence, it solely provides a frame, button, and label widget as well as a vertical box-layout widget. For experimenting with the new menu view, there exists a run script at gems/run/menu_view.run.
New launcher application
The new launcher application located at gems/src/app/launcher/ is a poster child of a multi-process GUI application on Genode. Similar to the existing launchpad, it can be used to dynamically start and kill subsystems. But in contrast to the launchpad, which contained a widget library, the new launcher delegates the (potentially complex and bug-prone) graphics processing to a sandboxed child process (the menu view). The launcher is able to toggle visibility of the dialog using the new nit_fader component, which is instantiated as a child process as well. Thanks to this multi-process technique, the complexity of the actual launcher, which needs to be ultimately trusted by all launched subsystems, remains low and thereby trustworthy.
In addition to being able to start and kill subsystems, the launcher uses nitpicker's new session-control interface (see Section Nitpicker GUI server) for toggling the visibility of subsystems. The new launcher can be explored with the run script gems/run/launcher.run.
New input merger
The new input merger component allows the aggregation of user-input events from an arbitrary number of sources. The aggregated stream of events is provided as a single input session. Thereby, it allows the merging of user input of multiple device drivers such as USB HID and PS/2 into one stream to be consumed by a single component such as the nitpicker GUI server.
The input merger is located at os/src/server/input_merger/. Please refer to the accompanied README file for configuring the component.
Libraries and applications
Improved Qt5 integration
Genode's Qt5 support received optimizations as well as the ability for Qt5 application to participate in the window-resizing protocol of the window manager. So, Qt5 windows can be resized by dragging their respective window borders.
Runtime environments
VirtualBox
Since the last release, we intensively tested and stabilized VirtualBox on Genode. We found several issues regarding the FPU handling and virtual TLB flush handling, which caused VMs to just stop after a while. Additionally, we enabled the missing VM-reboot feature and improved the handling of those VM exits that caused the recompiler of VirtualBox to be used unnecessarily. As the result of our stability improvements, we have become able to run VMs on VirtualBox 4.2 for days without any trouble.
The second part of our work on VirtualBox deals with upgrading from version 4.2.24 to a recent 4.3 version. Our motivation was twofold: On the one hand, VirtualBox 4.3 supports Windows 8 and multi-touch input pretty well, and on the other hand, the (user) front end we used in our 4.2 port has limited support to configure all the variations of virtual hardware setups that we desire.
With the port to version 4.3.16 of VirtualBox, we now support the configuration of VMs using VirtualBox .vbox files. These files are generated as a result of creating and configuring a VM in the VirtualBox GUI. Such .vbox files contain all features the virtual hardware should provide to a Guest VM. In principal, a user of VirtualBox on Windows/Linux/MacOS is now able to transfer the very same VM configuration over to Genode. An example configuration for a setup with a shared folder between Guest VM and the Genode world as well as networking looks as follows.
...
<start name="ram_fs">
...
</start>
<start name="nic_drv">
...
</start>
...
<start name="virtualbox">
<resource name="RAM" quantum="2G"/
<config vbox_file="my.vbox" vm_name="MyVM">
<libc stdout="/dev/log" stderr="/dev/log">
<vfs>
<dir name="dev"> <log/> </dir>
<rom name="my.vbox" />
<dir name="vbox"> <fs label="share_with_vbox"/> </dir>
</config>
<route>
<service name="File_system">
<if-arg key="label" value="share_with_vbox" /> <child name="ram_fs"/>
</service>
</route>
</start>
...
The corresponding my.vbox looks like this:
...
<VirtualBox ...>
<Machine ...>
<Hardware ...>
...
<SharedFolders>
<SharedFolder name="genode" hostPath="/vbox" writable="true" autoMount="true"/>
<SharedFolders>
<Network>
<Adapter slot="0" enabled="false" MACAddress="0800271D7901" cable="true" speed="0" type="82540EM">
<HostInterface/>
</Adapter>
...
</Network>
...
</Hardware ...>
</Machine ...>
...
</VirtualBox>
In Genode, the ram_fs server is used to provide a directory called "/vbox" to the VirtualBox VMM instance. In the Guest VM, this directory will appear as "genode" and is mounted writable. As network adapter, we support E1000 and PCNet. As network back end (provided by the host, which is Genode) we currently support solely the "HostInterface" XML tag, which uses a Genode-specific implementation using Genode's NIC-session interface. The MAC address configured in the .vbox file remains unused. Instead, the MAC address provided by the NIC server will be used. MAC addresses can be configured e.g. in the Genode bridge directly for each NIC client.
Updated Seoul virtual machine monitor
During Genode's Hack-and-Hike event, we met our long-term friend and former university colleague Bernhard Kauer. Besides the nice time during the event, it was also beneficial for the Seoul VMM on Genode. Bernhard reported about his work on extending the virtual BIOS emulation in his Vancouver VMM. With his recent changes, the VGA model becomes able to detect and emulate VESA switching attempts as performed by code inside the VM. Xorg servers as well as Genode use the x86emu library to emulate 16bit code of the Video BIOS provided by the graphics card and system BIOS. Normally, this code contains vendor-specific real mode instructions to perform the VESA mode switching. Because the original version of Seoul did not provide any real-mode code as Video BIOS, X.org's VESA driver could not work.
To benefit from Bernhard's work, we ported his changes over to the Seoul VMM, which turned out to be easily doable since Seoul originated from Vancouver. With the changes in place, we are now able to easily reuse existing Linux VMs and we are also able to boot graphical Genode setups in Seoul. The run script repos/ports/run/seoul-genode.run showcases how to start Genode x86 setups created by any other Genode run script directly as Guest VM inside Seoul.
Device drivers
DDE Linux
With the addition of the WIFI driver to the DDE Linux repository, we decided to do some cleanup within DDE Linux. First of all, we did not want to share any Linux files between the drivers. So we moved the USB stack, LXIP, and the WIFI drivers to different src/lib/ directories within contrib/dde_linux/. So, we are now able to individually update the used kernel version for a single DDE Linux driver with no side effects to other ported drivers. We mostly update drivers to gain support for recent hardware like the WIFI driver. After the split, we reverted LXIP to Linux version 3.9. because it generally runs more stable and is better tested with this kernel version.
Raspberry Pi
Genode added principle support for the Raspberry Pi one year ago in version 13.11. Back then, the driver support covered the interrupt controller, timer, UART, display, and USB. The latter was particularly challenging because the DWC-OTG USB host controller lacked public documentation. Hence, we ported the driver from the official Raspberry-Pi Linux kernel, which principally allowed Genode to support HID devices and thereby enabled interactive applications. However, the USB driver dramatically impeded the performance of the system because the host controller triggered an interrupt for each USB microframe, which results in a rate of 8000 interrupts per second. This is already pretty bad for an OS based on a monolithic kernel but it is overkill for a microkernel-based system where each interrupt is delivered as an IPC message with the associated context-switch costs.
- In-kernel USB SOF interrupt filtering
For Linux, the Raspberry Pi developers relieved the problem by adding a fast path for the highly frequent USB start-of-frame (SOF) interrupts. Each USB interrupt is served by a low-footprint routine executed as a so-called "fast interrupt" (FIQ) handler. Only if the frame number reaches a value that is scheduled by the USB driver, the handler will trigger an artificial interrupt to activate the actual USB driver. Those "interesting" interrupts occur at a rate that is more than an order of magnitude lower than the SOF interrupt rate.
Unfortunately, this optimization cannot be used as is on Genode where the USB driver lives in user land and lacks the privileges to install a FIQ handler. But the approach to hide SOF interrupts from the USB driver was worth investigating. We decided to split the USB driver into two parts. One part is the actual driver ported from Linux but without the FIQ optimization. With more than 30,000 lines of code, this part is highly complex but it lives as an unprivileged user process. The second part is a small USB SOF filter routine that is integrated into the interrupt-controller driver in the base-hw microkernel. The filter adds merely 100 lines of code to the kernel. Both the USB driver and the in-kernel SOF filter access the physical DWC-OTG controller. Each time when the USB driver schedules a micro frame, it writes the frame number to an unused scratch register of the host controller. When an USB interrupt comes in, the in-kernel SOF filter compares the current frame number with the number reported by the USB driver. Only if the current frame corresponds to the next scheduled frame, the filter propagates the interrupt to the user-level USB driver. This way, the USB driver is activated only for handling interesting events. Even though this optimization is not as sophisticated as the FIQ optimization found in the Linux kernel, it is highly effective compared to the original version while staying true to the microkernel architecture.
With the USB SOF filter in place, the interactive performance of Genode on the Raspberry Pi has reached a decent level. Furthermore, we could enable networking. Using lwIP running separated from the USB network driver, netperf reports a throughput of 50 MBit/second, which we find acceptable for this platform.
- Framebuffer driver
To accommodate the use of translucent nitpicker views as well as SDL applications such as Supertux, we enhanced the framebuffer driver with an configurable buffered mode. If enabled, the driver keeps the client pixels in a separate pixel buffer that is copied to the physical frame buffer not before the client explicitly issues a refresh operation. This way, intermediate drawing states remain hidden from the user.
Default mode selection of VESA driver
Unless explicitly configured to a specific resolution, the VESA driver used to set a mode of 1024x768. When using a Genode system image across machines with different displays, we had to provide different configurations to accommodate the variety of displays. Because we longed for a way to let Genode automatically adapt to the native display resolution, we changed the VESA driver to pick the video mode with the highest resolution from the list of available modes.
This works well if Genode is used on laptops because the native display resolution is typically reported as the highest available mode. Unfortunately, when using VGA, the highest available mode usually exceeds the native resolution of the connected output device such as a data projector. In this case, the default mode can be overridden by explicitly specifying a mode in the configuration.
Build system and tools
Updated tool chain
The tool-chain has been updated to version 4.7.4, which fixes problems with executing the tool-chain build script on the current version of Ubuntu Linux.
Improved tooling for using Intel AMT
We use Intel Active Management Technology (AMT) on diverse native test hardware to forward serial output over network (SOL) to developer machines and to power-on, reset, and power-off test machines. Until now, we used the tool amttool, which uses a SOAP EOI protocol for communication. Newer hardware with AMT version 9 or higher dropped the support for SOAP EOI - read a blog entry by Intel for more details - switched to the WSMAN interface. The tool wsman on Linux speaks the protocol and can be used as a replacement. We integrated the support of wsman into our run tool infrastructure and use it by default if installed - otherwise amttool will be used. Of course, you can enforce your preferred tool by setting the RUN_OPT variable in your build.conf file or as an environment variable accordingly, e.g.
RUN_OPT="--target amt --amt-tool wsman" make run/printf
or
RUN_OPT="--target amt --amt-tool amttool" make run/printf